<仕様>
|
動作電圧
|
4.5〜6V |
|
消費電流
|
無負荷時300mA ストール時600mA |
|
駆動トルク
|
1.6kgf-cm(5V時) |
|
スピード
|
0.125sec/60°(5V時)
|
|
ギア
|
プラスチック |
|
モータ
|
コアドDCモータ |
|
回転角度
|
160度(Aタイプ) 140度(Bタイプ) ※1 |
|
パルス幅
|
500〜2100uS(Aタイプ) 750〜1850uS(Bタイプ) 中心位置1300uS ※2 |
|
サイズ
|
23.8x11.8x20.8 mm |
|
重量
|
9g (メタルギア版は13g) |
|
線のタイプ
|
橙:信号、赤:電源+、茶:GND |
|
付属品
|
サーボホーン、サーボホーン用ビス、取り付け用タッピングビスx2 |
※1グレード(価格)により回転角度が変わります。
※2一般的なRCサーボの中心位置(パルス幅1500uS=中心位置のものが多い)と異なりますのでご注意願います。
<価格>
 ノーマルホーン、サーボホーン用ビス、取り付け用タッピングビスx2 付属 ノーマルホーン、サーボホーン用ビス、取り付け用タッピングビスx2 付属
タイプA 600円 (税別)
 ノーマルホーン、サーボホーン用ビス、取り付け用タッピングビスx2
付属、メタルギア版 ノーマルホーン、サーボホーン用ビス、取り付け用タッピングビスx2
付属、メタルギア版
タイプMG 900円 (税別)
※タイプBはアウトレット品につき、生産状況によっては品薄となりますのでご了承願います。
<オプション>

ローハイトホーン 140円(税別)
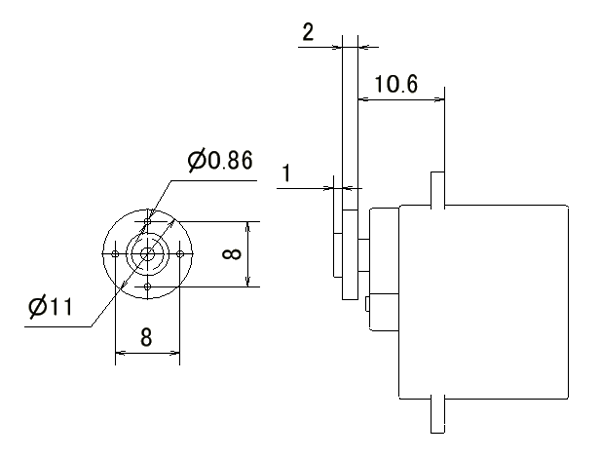
<寸法図>
<基本寸法>

<ノーマルサーボホーン取り付け時>
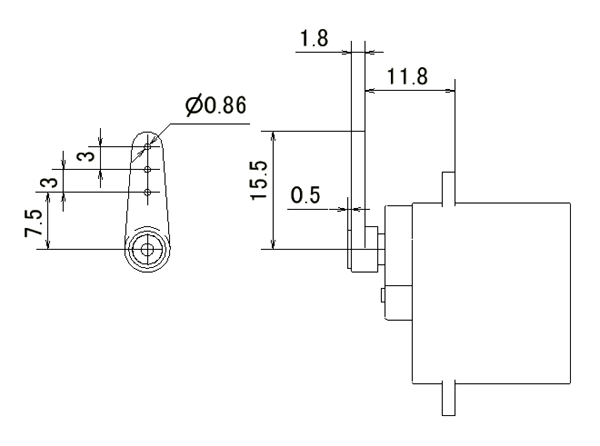
<ローハイトホーン取り付け時>
<入力パルスと回転角度>
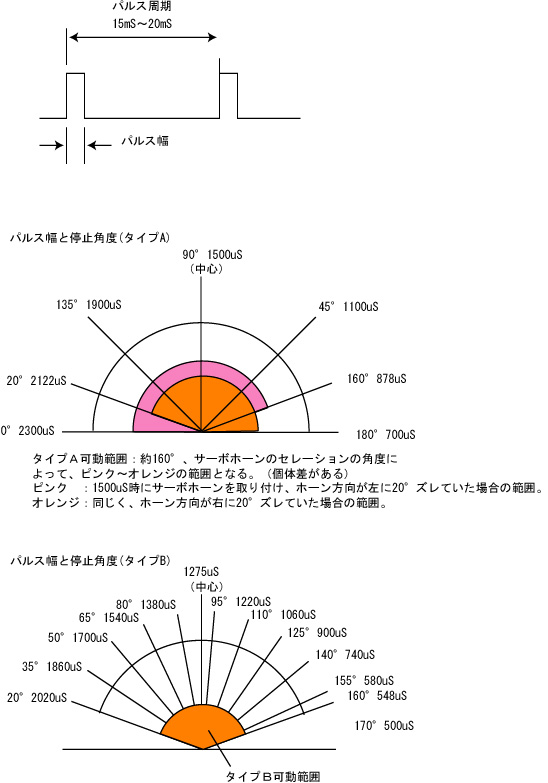
Bタイプは2020〜548uSの範囲内にしてください。この範囲から外れるパルスを加えると、構造的な限界を超えて軸が回転しようとしてしまい、最悪はギアの破損、暴走になりますのでご注意願います。
※メタルギア版の動作角は約180度です。
<ブラケット>
※専用ブラケットを製作中です。
<使用事例>
※使用事例を製作中です。
<Q&A>
Q:数分ぐらい動かしていると、最大角あたりで暴走する。
A:長時間動かしていたり、高い負荷をかけたりするとサーボ自体が熱を持ちます。このとき、内臓のポテンショメータの値が若干変化し、位置がずれることがあります。このとき、最大角まで回していると最大角以上の数値がポテンショメータより読み出されて位置制御が暴走することがあります。冷やすと元にもどります。
Q:動かしていると「ガキガキ」いうようになった。
A:中のギアの一部が破損している状態です。サーボを交換してください。最大角以上に回そうとしたり、手などで強く回していると中のギアの一部(特に出力軸から数えて2個目のギア)が破損する場合がありますので注意して下さい。
<一般情報>
以下、一般的なRCサーボの情報を掲載します。
<方式について>
●アナログ方式
入力されたパルスを内部の回路でアナログ処理して位置決めをする方式。一般的に位置精度が悪いが安価。回転角度はパルスの幅によるので、物理的限界(通常はポテンショの回転可能角度。ほとんどは180°)まで回転させられる。
●デジタル方式
入力されたパルスを内部の回路でデジタル処理して位置決めをする方式。位置精度と保持力が高い。負荷がかかると高周波音が出る。決められたパルス幅以上や以下のパルスは受け付けない。ラジコン用のデジタルサーボは回転角度が最大90°程度のものが多いが、ロボット用のデジタルサーボはほとんどが180°回転できる。
<線のタイプついて>
RCサーボはラジコンメーカーで規格がだいたい決まっていますが、線の色は各社バラバラです。サーボからは通常、線が3本出ています。
●信号線:サーボへパルス信号を送り、サーボの位置を指示する
●電源+:サーボへの電源供給用。バッテリのプラスにつなぐ
●電源GND:サーボへの電源供給用。バッテリのマイナスにつなぐ
|
タイプ
|
信号線
|
電源+
|
電源GND
|
| JR |
橙
|
赤
|
茶
|
| KO、フタバ |
白
|
赤
|
黒
|
| HITEC |
黄
|
赤
|
黒
|
| 三和 |
青
|
赤
|
黒
|
| ロボット用など |
灰
|
黒
|
黒
|
|
<トルクついて>
RCサーボのトルクは ?kg−cm で表します。これは「1cm先にある?kgのものを回転させられる」ということです。距離が長くなればなるほど必要になるトルクは増えます。ロボットを作る前に、概算で必要なトルクを計算してからサーボを選ぶほうが良いでしょう。
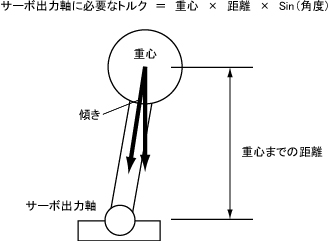 |
ロボットの関節、つまりサーボ、にどのぐらいのトルクが必要かは動かし方にもよります。歩行ロボットの場合は左図のような計算方法になります。
よって、
●重心が大きくなる
(ロボの体重が大きい)
●重心までの距離が長い
(重心が上にある。またはロボの身長が長い)
●傾きが大きい
(足間が広く、大きく傾けないと重心移動ができないなど)
と、大きいトルクが必要になります。 |
|
ロボットを作り始める前に使用したいサーボや関節数により大体の身長と体重はわかります。重心の計算はできませんが、とりえあえず中心位置を中心にてきとうにありえそうな重心距離を決めて計算することはできます。例として浅草ギ研が製作したロボの場合を計算してみます。身長25cm、体重800gで、重心移動時に
約10°傾きます。重心は適当に床から17cmの場所であろうと推測します。この時、足首のサーボに必要なトルクは
0.8kg × 17cm × Sin10°(0.1736) = 約2.36kg
となります。
※Sinの値は三角関数表(三角比の表)から求めました。 |