| ■ホビーロボット部品の製造・販売 モータコントローラ、センサ、音声、画像、無線モジュールなど、 ■ホビーロボット制作記事のページ (各種マイコン、PCとの接続事例) ■特殊メイク、特殊材料の販売 ※特殊メイクのコーナーはこちらに移りました。 |
|
| |Top(お知らせ) |製品紹介 |使い方とサンプルプログラム|通信販売 |リンク |ロボット掲示板 |会社案内 | |
| Easy Robotics for all enthusiastic people!!! ---HOBBY ROBOT PARTS SHOP ASAKUSAGIKEN--- Since 2003... |
|
2軸加速度センサの紹介 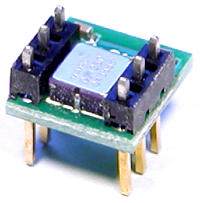 |
| <概要> 2軸加速度センサーはMEMSIC社の2軸加速度センサーにDIPタイプのピンとノイズ防止用のコンデンサを取り付けて使いやすくしたセンサーボードです。 加速度だけでなく、傾けることによる重力にも反応しますので傾きセンサーとしても使えます。 |
<仕様>
|
| 電極が移動して加速度を検地するタイプと違い、ヒータで暖めた充填物の温度分布で加速度を測定するので、内部に機械的な可動部分が無く、衝撃などに対する耐久性が高くなっています。
|
| <価格> 7,350円 |
<ピン配列> ※GNDは両方ともGNDにつながなくてはなりません。 |
<出力波形>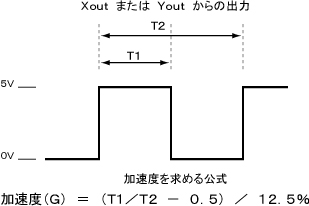 T2=10mSで固定、加速度でT1が変化する。 0G時にはデューティー50%、つまりT1=5mSとなります。 |
|
<重力と傾きについて> 地球の重力は垂直方向に1Gです。加速度センサを傾けるとこの重力に反応しますので90°傾けると1Gの力が生じます。 傾きと重力の関係は次の図のようになります。 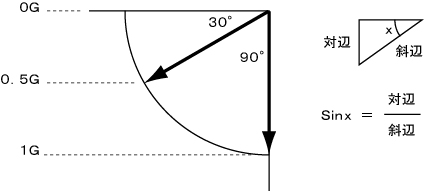 以上から 重力加速度(G) = Sin(傾き角度) と言えます。 <動作イメージ>の図の公式で重力加速度(G)が計算できますのでアークサイン関数を用いて角度を計算することができます。
|
| <ドキュメント> ■2軸加速度センサ取り扱い説明書 |
| <使い方事例、サンプルプログラム> ■H8との接続例 ■PICとの接続例 ■BASICスタンプとの接続例 |
| <Q&A> Q:測定範囲が0〜2Gとあるが、ロボット作成には何Gまで測れればよいのか? A:ロボットの作り方と用途によっても変わってきますが、一般的に 手足の動き−>2Gぐらい、 転倒時の衝撃−>10Gぐらい といわれています。 |
| (C)Copylight 2003. 有限会社浅草ギ研 | 通信販売の法規(訪問販売法第8条)に基づく通信販売業者の表示 |