|
<RemoHKPの概要>
■「リモートブレイン」タイプのヒューマノイドロボットキット
Remo(リモ)は、ロボットとPCを無線で接続する「リモートブレイン」タイプのロボットシステムです。2眼カメラとシリアルサーボにより、高度なアプリケーションを実装可能です。RemoについてのくわしくはRemoのページを参照願います。
RemoHKPはRemoにサーボとサーボコントローラ、バッテリ、充電ボード、ACアダプタ、アルミフレームが付いたヒューマノイドロボットキットです。このほかに、PCとBluetooth無線アダプタ(1500〜3000で市販されている)があればすぐにでもリモートブレインロボットシステムが構築できます。
■多数のサンプルソフト
RemoHKPをすぐに動かせるサンプルソフト、RemoMortionEditorを用意しています。このソフト単体でもリモコン操作ロボットが作れますが、ソースを含むプロジェクトを全部公開していますのでそれらを改造することにより自律ロボットの作成も可能です。その他、人検知などの画像処理プログラム例も公開しています。
■ロボット神経システム互換
浅草ギ研のロボット神経システムAGB65シリーズ互換(*)のI/Fを搭載。普通のRCサーボ、DCモータなども駆動でき、センサー入力、音声出力も可能。
(*)AGB65シリーズで460Kbps対応のものに限る
■ACアダプタによる連続動作
オプションのLiPo充電基板により、ACアダプタを使用しての連続稼動が可能です。シリアルサーボを使用したロボットの場合、動作時以外を脱力にしておくことにより、数日の連続稼動などが可能となります。
■軸直交
フレームは軸直交になっているので、計算歩行時などに最適です。足だけでなく、腕、首部も含む全体が直交の軸配置になっています。
<購入前のご注意>
■本製品を使用するには460800bpsの通信速度が出るBluetooth無線機がPC側に必要です。Bluetoothの機種によっては115200bpsまでしか出ないものが多くありますのでご注意願います。PC側のBluetoothについてはRemoのページの動作説明の所で詳しく説明しています。
■本製品はバッテリを使用しますので、安全には十分気をつけてください。バッテリ破損などにより損害が起きても浅草ギ研は補償できかねますのでご了承下さい。
<価格>
RemoHumanoidKit/P 399,000円 (本体価格380,000円)
<オプション>
<460kbps対応のAGB65シリーズ>(型名末尾に/460kが付きます)
センサボード AGB65-ADC/460K 12,600円 (本体価格12,000円)
MP3音声再生ボード AGB65-MP3/460K 14,700円 (本体価格14,000円)
※センサーボードとMP3音声再生用ボードの2つがRemoHKPの胴体内に内蔵可能です。
※その他、Remo関連のものが増設可能です。
<もくじ>
・梱包内容
・組み立て
・組み立てた後は
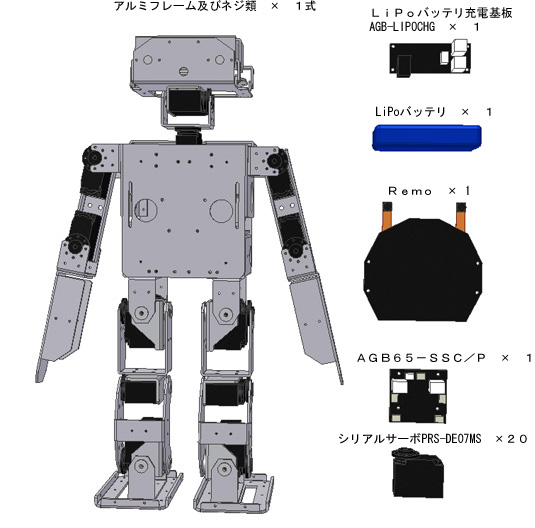
<梱包内容>
1)アルミフレーム 1式
2)シリアルサーボPRS-DE07MS x 20 (460800bps設定済み、#1〜#20にID設定済み
3)Remo x 1 (メインボード、Bluettoth無線、2眼カメラ)
4)AGB65-SSC/P x 1 (シリアルサーボコントローラ)
5)Lipoバッテリ充電基板 x 1
6)ACアダプタ x 1
7)LiPoバッテリ x 1
8)ネジ類 1式
・M2L4ネジ x 60
・M3L6ネジ x 20
・M2L8ネジ x 12
・M2L4皿ネジ x 8
・スペーサ5mm x 12
・座付きM1.7L4ネジ x 80以上
9)ケーブル類1式
・サーボケーブル x 20
・RSCケーブル8cm x 1
・RSCケーブル22cm x 1
・AGB65通信延長ケーブル4P22cm x 1
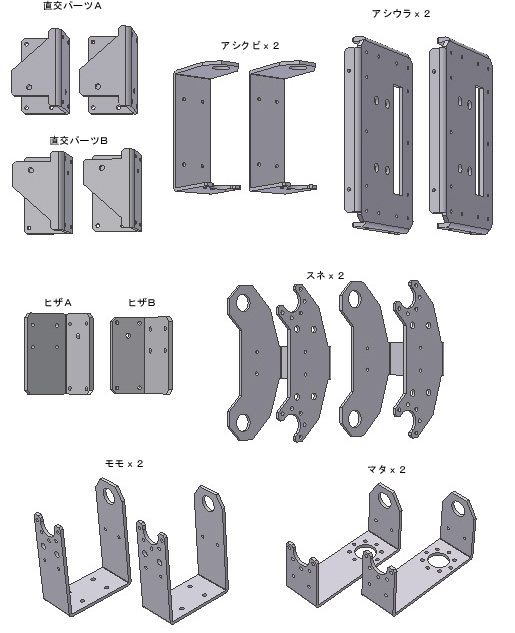
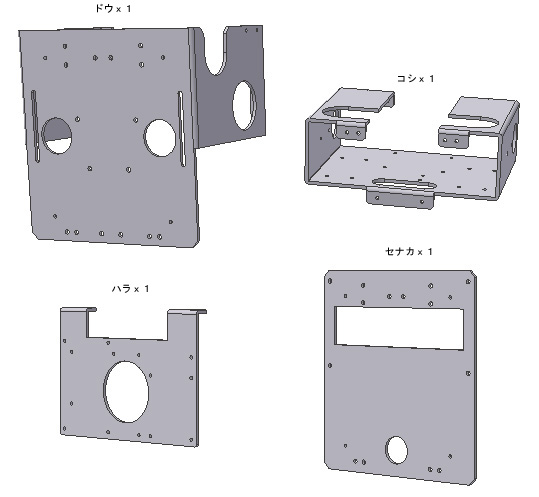
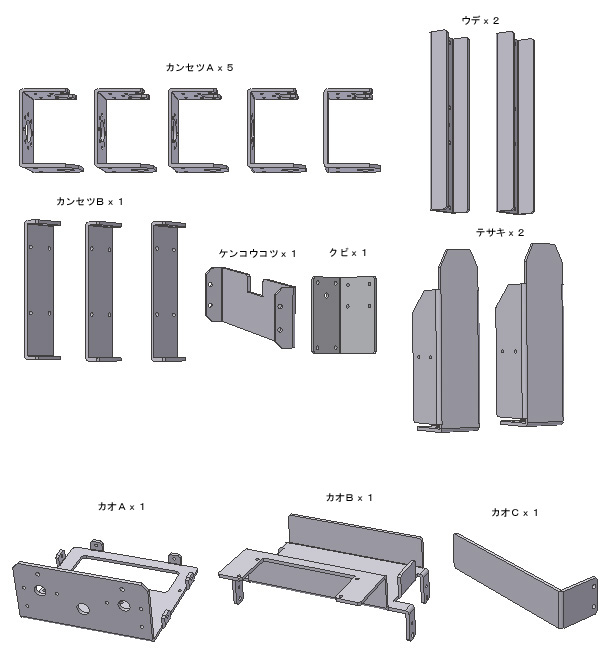
<アルミパーツ名称説明>
<脚部>
<胴体>
<顔および腕部>
<軸パーツ>

<組み立て>
組み立てについて説明します。尚、特に説明はしていませんが、アルミパーツ同士をネジ止めする場合はネジロック剤を使用して、ネジが外れないようにしてください。ネジロック剤は添付していませんので、ロボット店もしくはラジコン店で入手願います。
本製品のようなアルミ板金パーツのロボット全般に言えることですが、一度組み立てて終わり、ということにはいきません。調整や、故障時のサーボ交換など、何度もネジを入れたり外したりするのが一般的です。組み立て作業は時間に余裕をもって、あせらずに、安全に行ってください。
一部、プラスチックにネジをねじ込む箇所(サーボやサーボホーンの取り付けなど)がありますが、あまり強くねじ込むと、プラスチックが削れてネジが固定できなくなる場合がありますので注意してください。プラスチックのネジ穴が壊れた場合は、ネジ先にホットボンドを付けてねじ込むと修正できます。
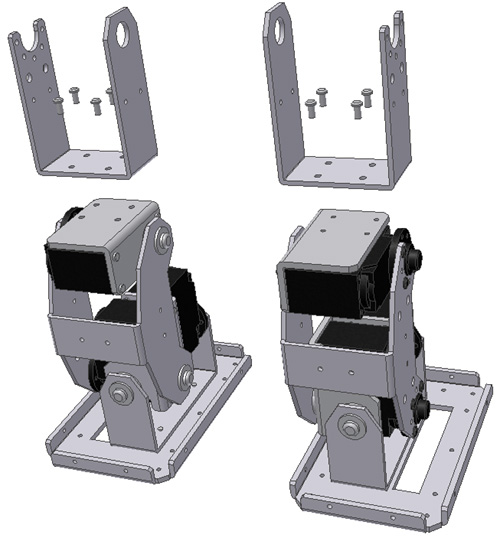
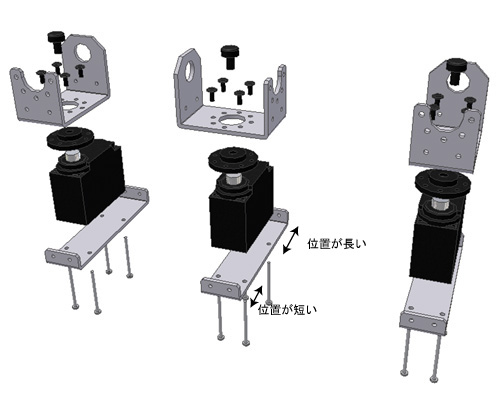
1)直交パーツ
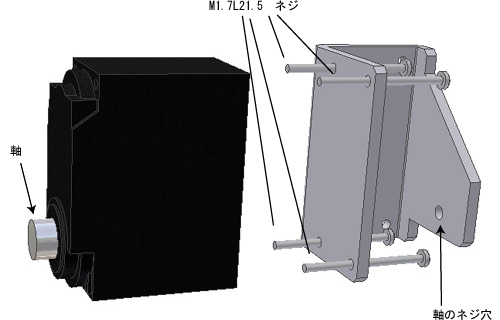
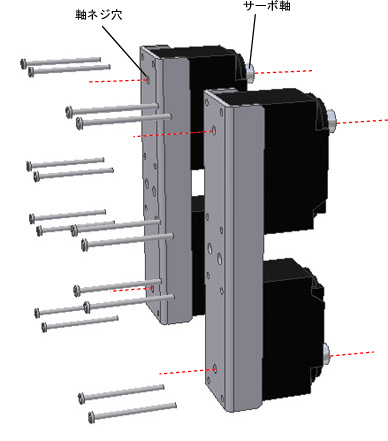
まず、直交パーツAを上の図のようにサーボへネジ止めします。サーボは軸パーツの外側に付くような形になります。ネジはサーボに付属のネジを使います。ネジの名称はM??L??というように表し、Mがネジ直径を表し、Kがネジ長さを表します。以降、ネジはこの名称で表します。
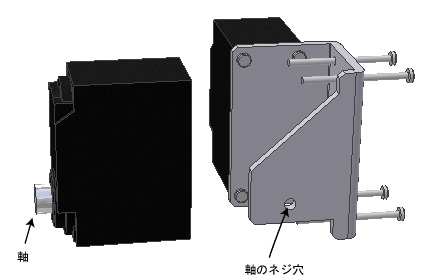
「サーボの軸」と、「直交パーツの軸のネジ穴」が同じ位置に来るように取り付けてください。
このパーツを2個つくり、直交パーツBを使ってそちらも2個つくります。
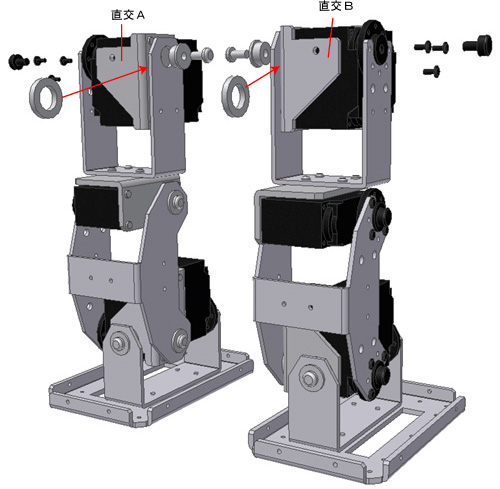
次に直交パーツにサーボが入るような形で取り付けます。
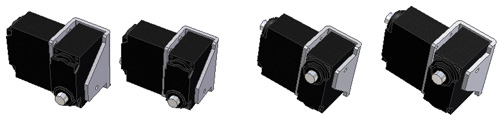
直交パーツAで2個、直交パーツBで2個つくった状態です。合計4個の直交パーツになります。AとBは対象の形になっています。直交パーツAで組んだものを「直交A」、Bで組んだものを「直交B」とします。
2)足裏〜足首
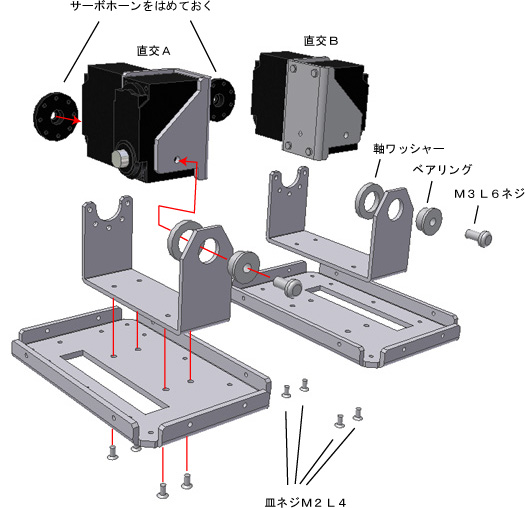
上の図のように、「アシウラ」パーツと、1)で作った直交パーツを取り付けます。アシウラの方向に注意してください。上の図で、手前側が完成した時の正面側になります。
まず、 「アシウラ」には「アシクビ」を皿ネジM2L4で4点で止めます。
次にサーボにサーボボーンをはめます。
次に軸ワッシャー、ベアリング、M3M6ネジで軸をとめます。以後、とくに説明しませんが、軸はこのようにしてとめます。
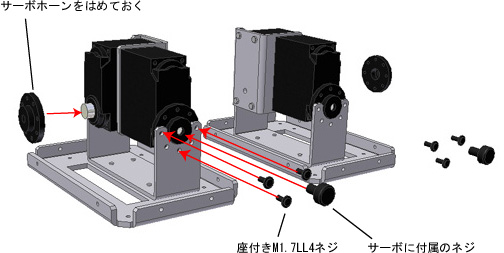
上の図は、完成した時には背面となります。かかとの方向です。こちら側はサーボに付属のネジと、座付きM1.7L4ネジで止めます。図には出ていませんが、サーボ付属のネジには菊ワッシャーがついていますので、サーボについていた状態とおなじように止めます。サーボホーンの取り付けはこのように座付きネジで止めます。止める場所は図のように左右と下の3点だけでよいです。以降、特に説明しませんが、サーボホーンを取り付けるときにはこのようにして止めて下さい。
3)〜ヒザ
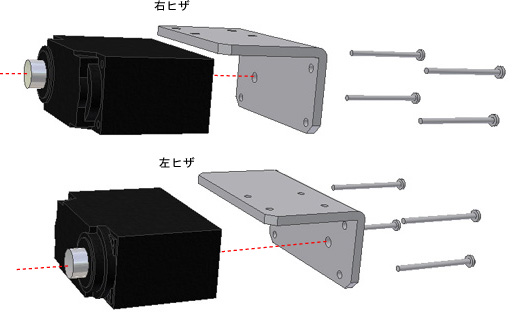
ヒザ部を上のように作ります。ヒザパーツは対象形なので気をつけてください。軸ネジ穴の方に軸が来るようにします。
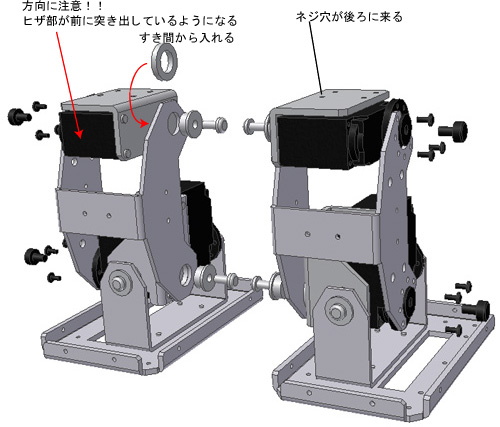
ヒザ部と足首部を「スネ」パーツで接続します。軸の止め方はいままでと同じです。
軸ワッシャーは、サーボを止めているネジのために、入れられない方向があります。ワッシャーが入るすき間を探して、ワッシャーを入れてください。ワッシャーがズレるととベアリングのネジ止めがやりずらいので、足を横に倒して、作業しやすい状態にしてください。
尚、サーボホーンのはめ方や、サーボの軸の回転状態によっては、図のようにきちんと水平、垂直にパーツが組めない場合があります。角度は後で調整できますので、ここではとりあえず、おおまかな角度で止めておいて下さい。
4)〜モモ
出来上がったヒザ下パーツに、「モモ」パーツをネジ止めします。ネジはM2L4ネジを使います。モモパーツの向きが左右逆になりますので注意してください。穴が多い方が外側になります。
その上に、直行パーツを取り付けます。直交パーツは、モモパーツの中に入るような形になります。方向に注意してください。
5)〜腰部、脚部の完成
上の図のように、「マタ」パーツをサーボに取り付けます。ここでは、座付きネジで4点以上で止めます。サーボネジはキツくしめてください。
次に上の図のように軸を止めます。
出来上がった足部を、「コシ」パーツに図のように入れ、ネジ止めします。コシパーツのUの字が、サーボホーンの側面になるように、つまり、U字部でサーボホーンを囲むような形になります。
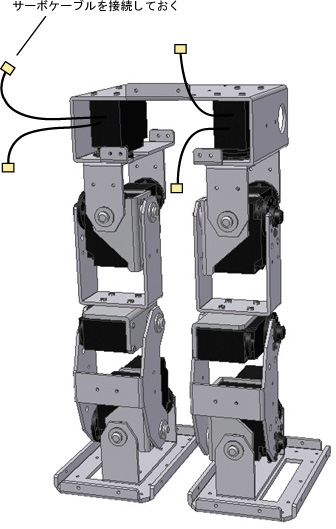
これで足部の完成です。一番上のサーボは、胴体を取り付けるとかくれてしまうので、サーボケーブルを取り付けておきます。
6)首、うでの組み立て
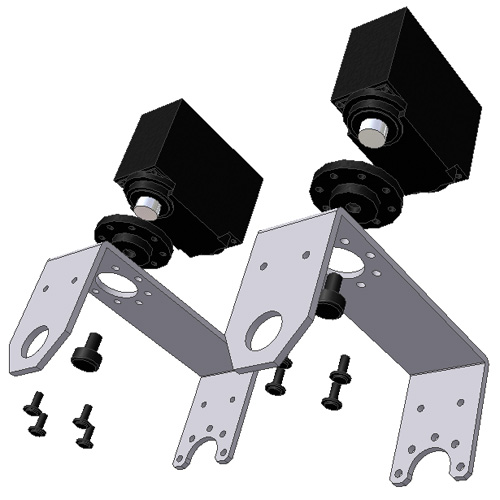
各「ウデ」パーツにサーボを取り付けます。サーボの軸側に、軸ネジ穴がくるようにしてください。
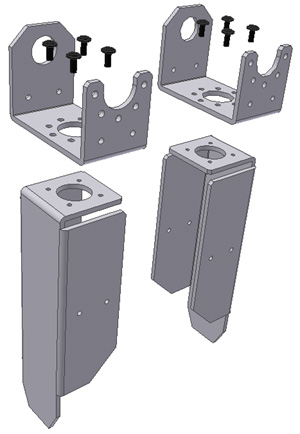
「カンセツA」パーツを「テサキ」パーツに取り付けます。座付きネジを使って4点で止めます。
残りの「カンセツA」パーツと、「カンセツB」パーツを使って、図のようにサーボを取り付けます。図の左が右肩、真ん中が首、右が左肩のパーツになります。首のパーツだけ、カンセツAの取り付け方向が違いますので注意してください。カンセツBのネジ穴位置が短い方が、サーボの軸側になります。
カンセツBは、コの字型がサーボをつつむような方向に取り付けます。
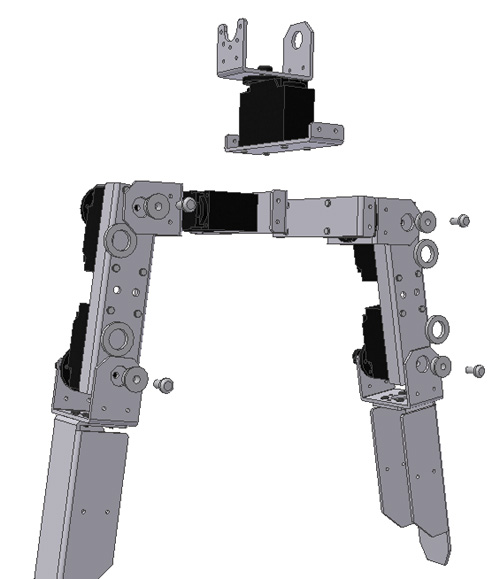
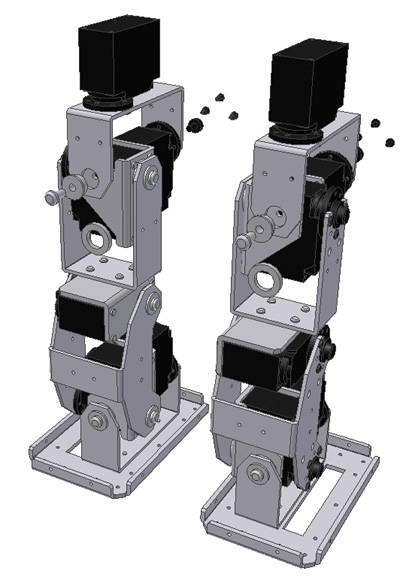
ウデパーツと、テサキパーツを肩パーツに取り付けます。上の図の方が背面になります。
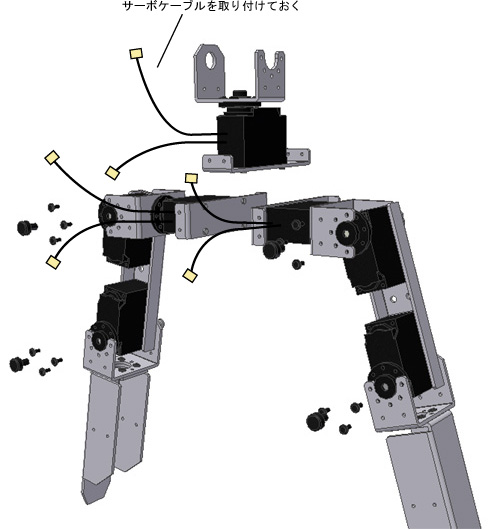
正面側のサーボホーンも止めます。これで、腕と首の完成です。図でケーブルが出ているサーボは、胴体を取り付けると隠れる部分なので、この時点でサーボケーブルを取り付けておきます。
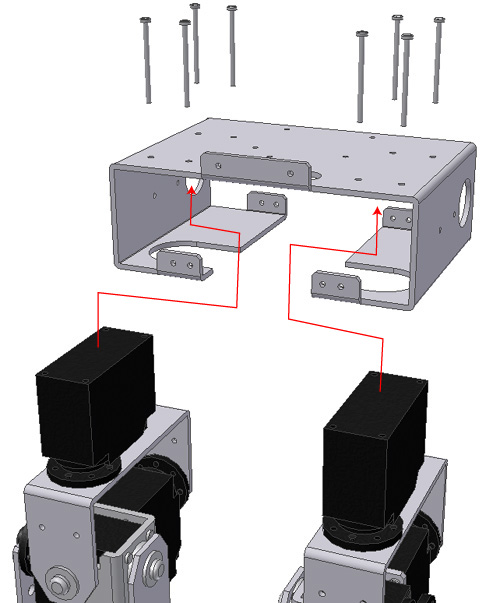
7)胴体の取り付け
「ドウ」パーツを、M2L4ネジで上の図のように止めます。
次に、足パーツを上の図のようにM2L4ネジで止めます。このとき、一番上のサーボにはケーブルをさしていますが、このケーブルを足の間から下側に引き出しておきます。(股間の間からケーブルが下がる感じ)
8)顔の組み立て
「カオA」パーツに「クビ」パーツをM2L4ネジで止めます。
クビパーツにサーボをネジ止めします。
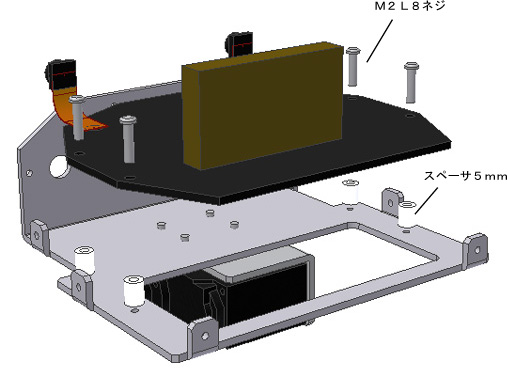
Remo基板をカオAパーツに取り付けます。上の図のように、スペーサとM2L8ネジを使って、4点で止めてください。
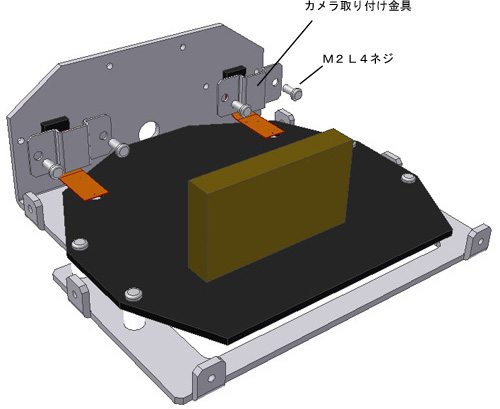
カメラを取り付け金具で固定します。
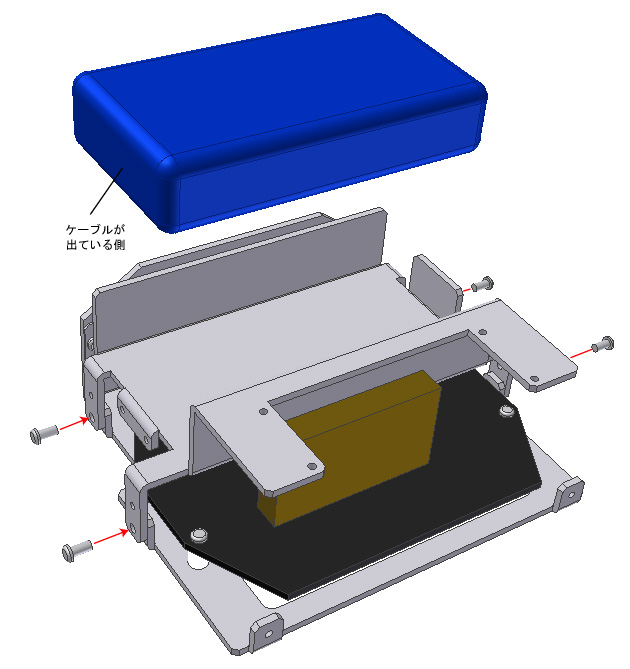
「カオB」パーツをM2L4ネジで止めます。その上にバッテリを乗せます。
充電基板をカオBパーツにネジ止めします。充電基板の方向に注意してください。
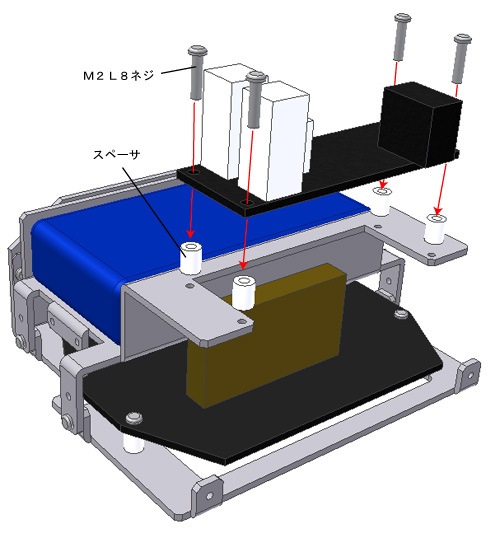
「カオC」パーツでバッテリを固定します。
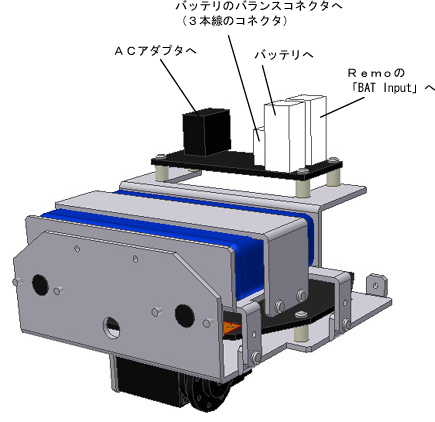
これで顔部の完成です。バッテリと充電基板は、バッテリから出ているコネクタで接続してください。充電基板の「OUT」とRemoの「BAT
Input」を付属の「RSCケーブル8cm」で接続してください。
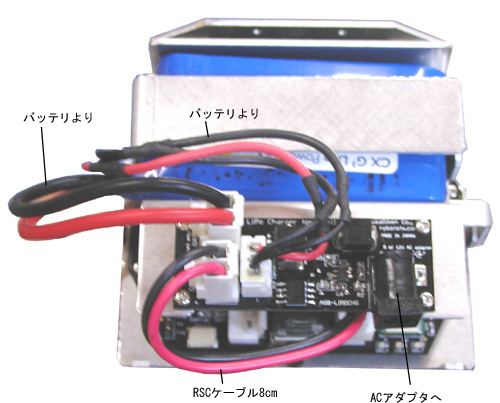
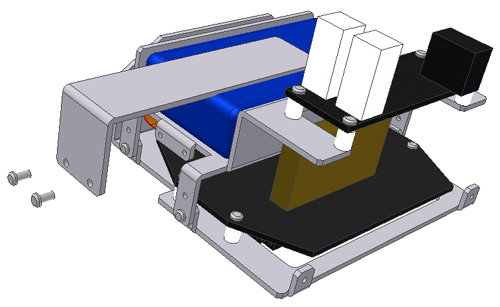
実際の接続を後ろ側から見た写真です。
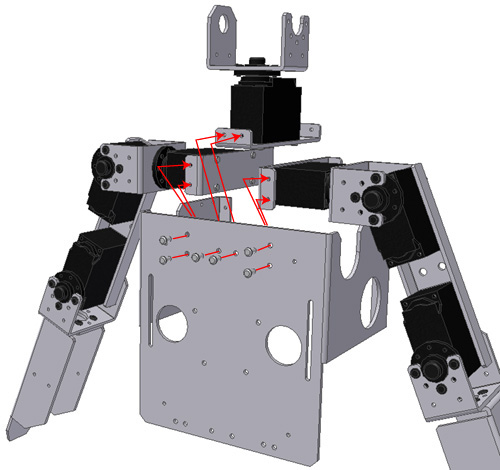
9)全体の組み立て
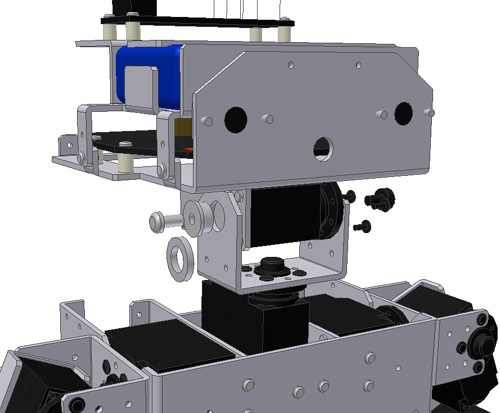
頭を取り付けます。首の2つのサーボはサーボケーブルでつないでください。また、左右の腕3個づつのサーボもサーボケーブルでつないでください。
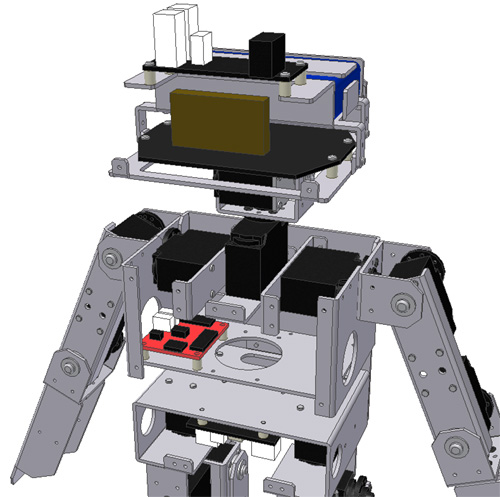
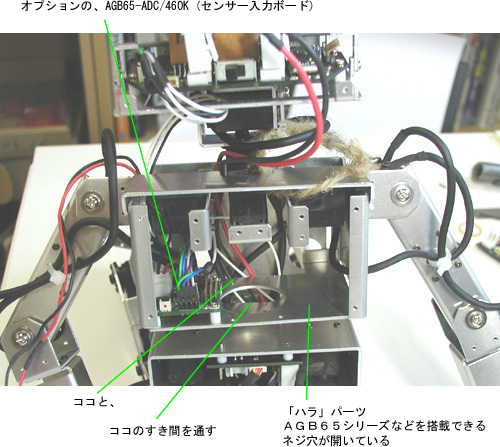
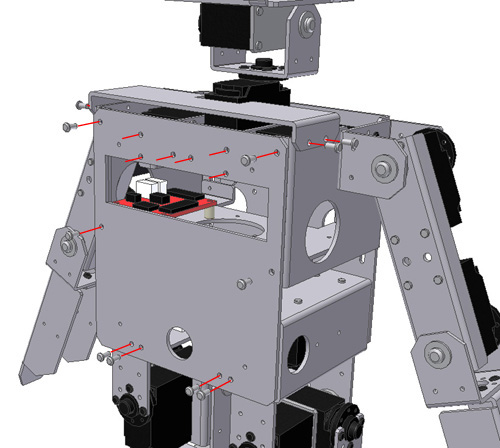
ケーブルが無い状態だと、現在は図のようになっているかと思います。背中方向から見た図です。図の赤い基板はオプションのAGB65シリーズです。「ハラ」パーツはこのように胴体の中に仕切りを作り、基板を増設することができます。ハラパーツにはセンサー入力ボードAGB65-ADC/460Kと、MP3再生ボードAGB65-MP3/460Kを取り付けられるネジ穴が開いています。自作ボードなどを内蔵する場合は、ハラパーツにネジ穴を開けて取り付けてください。
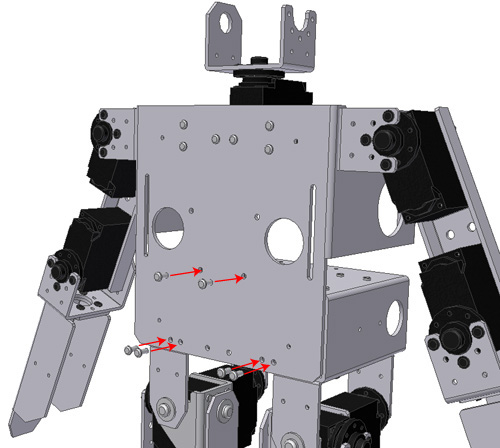
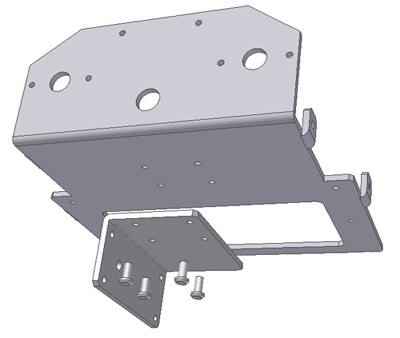
ハラパーツの固定は、正面方向から、ドウパーツの長穴を通してM2L4ネジで固定します。
作図が難しかったので、配線の説明は実際の写真を使います。
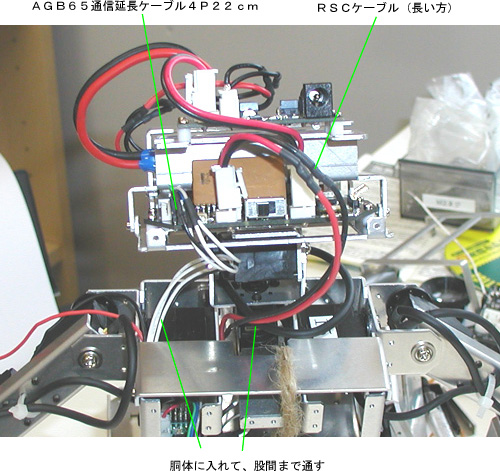
RemoにはAGB65I/Fがついています。ここにAGB65通信延長ケーブル4P22cm(4Pのケーブル)と、RSCケーブル(長い方)をつないで、胴体の中を通しておきます。
胴体内は、ハラパーツのコの字のところと、コシパーツの楕円のところにケーブル類を通します。コシパーツの楕円の幅は、RSCケーブルのコネクタを通すことができます。(通せない方向もあるので、コネクタの向きを変えて、通せる方向で通してください。)
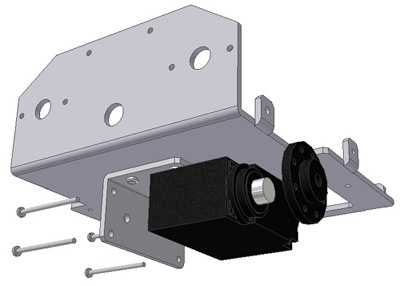
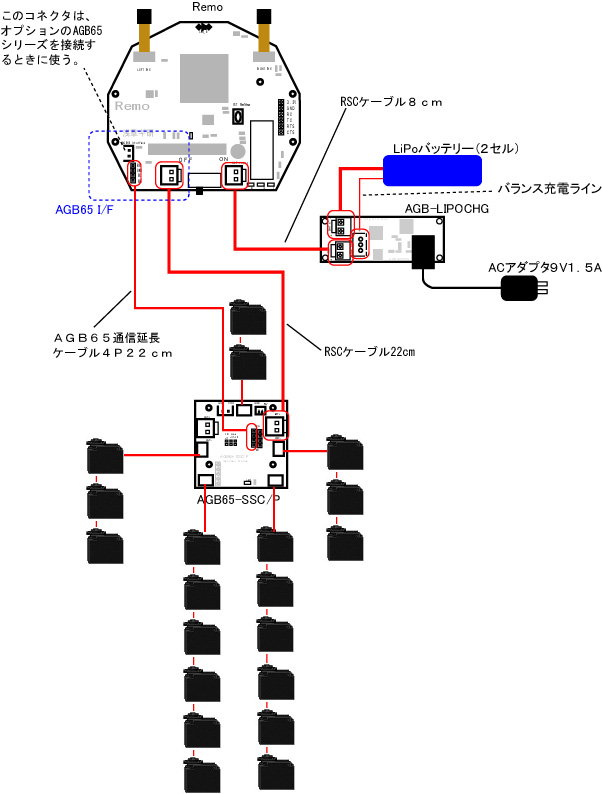
次に、ケーブル類を接続します。接続図は次のようになります。AGB65-SSC/Pは股間に取り付けます。胴体を通したケーブルの先にSSC/Pを取り付けます。
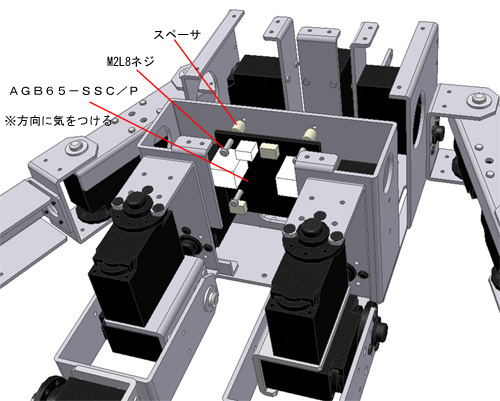
次に、股間の場所に、シリアルサーボコントロールボードAGB65-SSC/Pを取り付けます。上の図はケーブル類を除いた絵です。図のようにスペーサとM2L8ネジで固定します。基板の方向を間違えると、後の部品がとりつけられなくなるので方向に注意してください。
配線が終わったら、「セナカ」パーツを図のように取り付けます。(図中に、一部ネジの絵が抜けているところがありますが、赤線の部分をM2L4ネジで止めてください。)
これで完成です。ケーブル類などはぐちゃぐちゃになっているかと思います。必要に応じて寸法を短くしたり、輪ゴムなどでまとめたりしてください。アルミパーツにはネジ穴は穴があいていますので、それらを活用してケーブルをまとめることもできます。また、外装取り付けなどにも使えます。
ケーブル処理の例を紹介します。
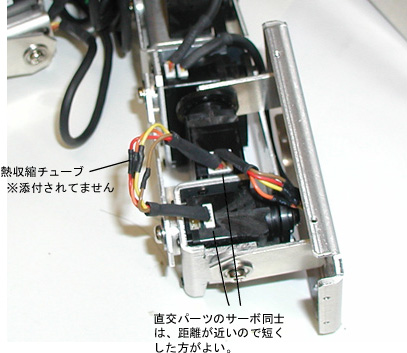
サーボケーブルは黒い被覆の中に4本の線が入っています。ケーブルを切断し、黒い被覆を取り去って寸法を短くします。線どうしはあらかじめ皮をむいておき、ハンダを付けておきます。その後、熱収縮チューブ(添付されてません)をかぶせて、線同士をハンダ付けし、熱チューブをヒートガンなどで熱してハンダ部を覆います。ハンダ部が露出していると、ショートしてサーボが燃えたりするので、線同士をハンダ付けしたらかならず覆うようにして下さい。

アルミフレームには穴があいているところがあります。上のよに、シュリンクラップ(添付されてません)などでケーブルをまとめる時に使います。
足の付け根付近ではサーボケーブルがダブつくかと思いますので、コシパーツの中に入れてください。
<組み立てた後は>
組み立てが終わったら、PCとRemoHKPが通信できるように無線の設定を行います。RemoHKPに搭載されているBluetooth無線は、初めに一度だけ「ペアリング」という操作を行うと、次に起動したときから自働的に相手と通信できるようになります。
ペアリングが終わったら、RemoHKPを動かすことのできるサンプルプログラム「RemoMortionEditor」を用意しています。
その後は、自分でPC上でアプリケーションソフトを作っていくことになります。
ペアリング以降の手順ついては、Remoのページの動作説明のところ以降に書いてありますので、そちらを参照願います。
<使用上の注意>
・このボードは電子機器です。取扱い、輸送時には静電気対策を行ってください。ICの足や、各ピンを直接手で触ったりすると静電破壊される場合があります。
・バッテリ使用時には電源ラインをショートさせると、バッテリが破裂・発火する可能性があります。作業中にはショートさせないよう十分注意して下さい。また、取り付け後も、あいている電源ラインに導電物質が触らないように注意して下さい。 |