2009/11/3
もう11月か。早いなあ。
さて、なぜか子供が家にいるので不思議におもってましたが今日は祝日なんですね。ということで一気に仕事モードから休みモードへ。
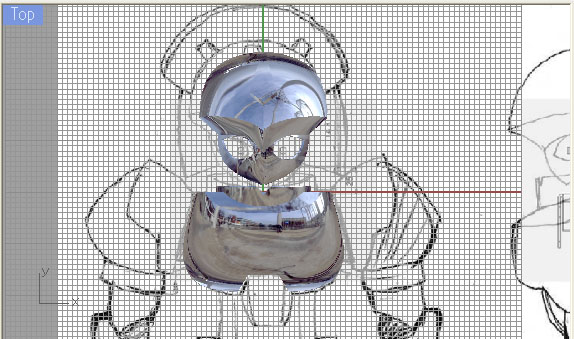
気合が入らないので、ライノとたわむれることに。
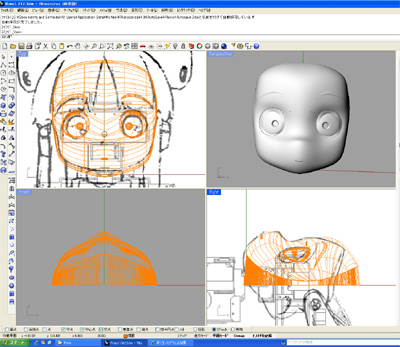
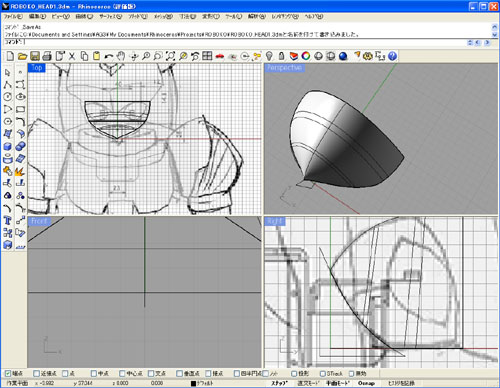
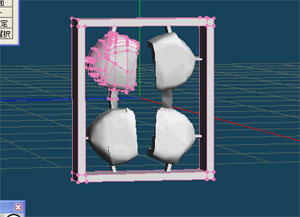
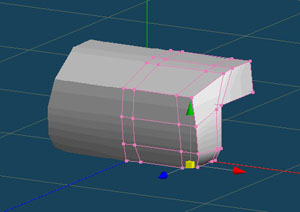
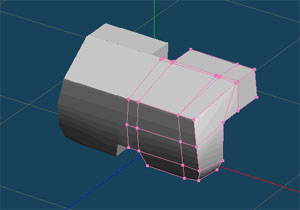
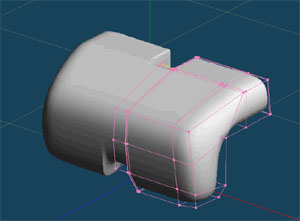
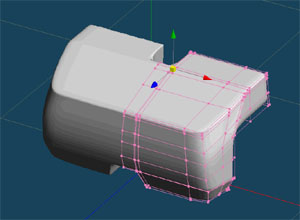
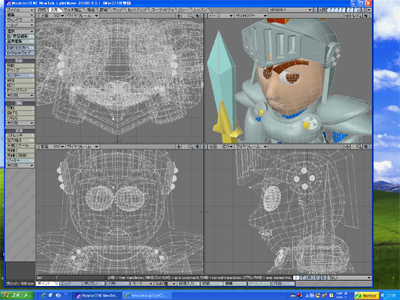
いままで、ずっとメタセコ(ポリゴンモデラ)の考え方でモデリングしてましたが、サーフェースモデラは基本的に造形のアプローチを変えないと上手くいかないことが判明。人形系の顔を作る参考書はメタセコのが多いのでそれを参考にしてた。メタセコの場合は顔半分を作ってミラーするという手法で左右均等にするが、ライノでこれをやるとどうしても顔の中央部分がなめらかにならない。接線を意識しても曲線を描くのがかなりメンドい。
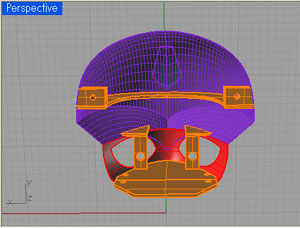
ということでいろいろ四苦八苦した結果、顔の表面は左右同時にサーフェース化するのがよいというのがわかった。さらにロフト機能が結構使えることが判明。ネットワーク機能が便利そうだったが、複雑な形はNARBSをよく理解してないと無理。ロフトなら適当に解釈してくれるような感じ。で、上の上体までできた。
あと、フレーム曲線を変えるたびにサーフェース貼りなおししないといけないと思ってたら、ヒストリボタンを押すとサーフェースが追従して自動修正されることがわかった。やはり、この手のソフトはいきなりいじるのではなく、参考書をよく読んでから触った方が時間が無駄にならないと痛感。基礎からやりなおしてみよう。
2009/10/31
ご無沙汰してました。ここ最近は新兵器を発明(新製品を開発)してたりして忙しかった。
そういえば、その間に、浅草ギ研で合宿があったり、ロボワンがあったり、プレゼン大会があったりしましたっけ。時が経つのは早いなあ。合宿に来ていただいた方々、どーもでした。楽しい時間をすごせました。
さて、新兵器の発明(新製品の開発)もひと段落し、本日は久しぶりに予定業務を日が暮れる前に終わらせたので久しぶりにライノいじってみました。
全然忘れてる...
ということで、ライノのオフィシャルトレーニングブックをもう一度やりました。ワークスコーポレーションが出してるヤツ。改めて読むと、これが一番良い教本ではなかろうか。
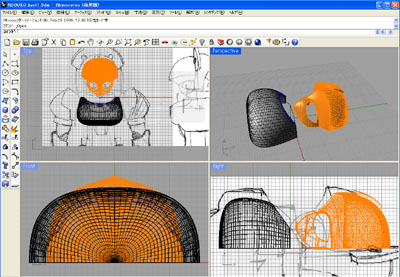
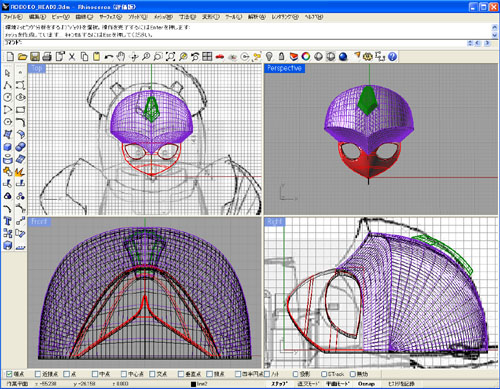
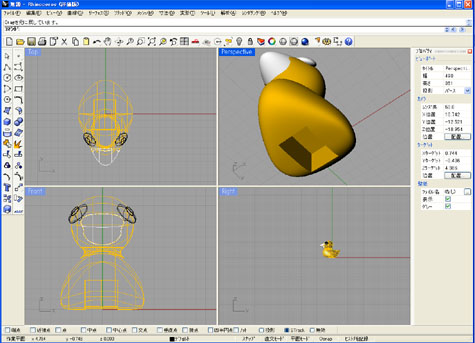
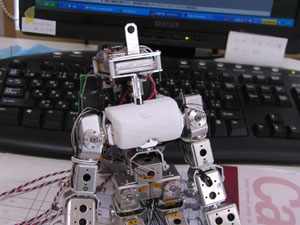
ということで、趣味ロボの顔をモデリングしてみました。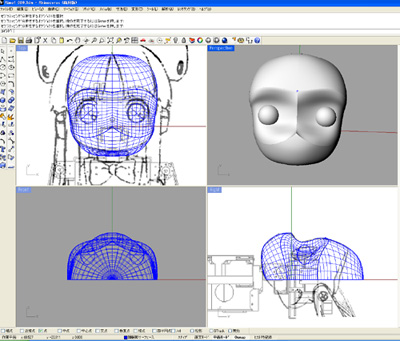
ロボ子じゃない??そうなんです、ロボ子(でかいロボ)は一時断念しました。で、今はピルクスのPRS-DE07MSで比較的小さいのを作ってたりして。
シリアルサーボっていいっすね。
私も桜田一門の仲間入りの気配...
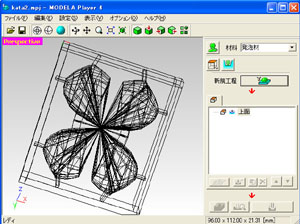
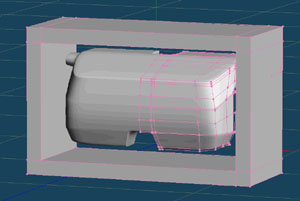
ライノですが、オフセットすると隙間が空いたり、特異点(集約線とか)がごちゃごちゃになったりするのは、許容誤差をいじれば回避できることがあるのを発見しました。「宇宙サイズでもミクロでも正確にモデリング」というのを間にうけてたのが敗因だったようだ。上の本ではその辺のことが詳しく、というか、ライノだけで解決できないよ、ということが詳しく書いてありますね。
あと、許容誤差を落としてポリゴン化すれば、大抵の特異点はオミットされることが判明。誤差0.1mmとかだとほとんどの形が隙間なしでつくられました。どうせモデラで削るので、0.1mm誤差なんて無問題。オフセット機能はお面パーツを作るときにはかかせない。
2009/7/25
わんだほー7に参加してきました。(先週の話ですが)
大会スタッフ、出場者の方、見学に来ていただいた方ご苦労さまでした。大会風景を写真にとろうとおもってたらカメラにメモリカードが入ってなかった...あいかわらず、ゆるゆるの雰囲気の中、楽しい時間をすごせました。最近ちょっと仕事でロボットやってるのが苦痛になってきてて、ロボットつくりの楽しさを思い出せてよかったです。
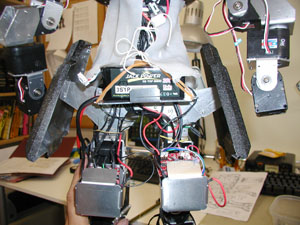
ロボ子は、大会前日にハードが完成という状況だったので動きが全然ダメだった、にもかかわらず、大きさと外装で結構人気があったように感じた。産総研の女の子ロボもそうらしいが、中身が実は凝ってても、外見の方が話題になる、と。
ということで今後の方向性ですが、ロボ子は中身を極めるよりも、この程度の完成度でモーションなどを追求して、エンターテイメントに徹するのがよいかなあと考えてます。本来なら今後はロボ子を計算歩行・自律して「関東ロボット練習会インテリ部門(しまけんさんが勝手に作った)」
に入門しないといけないのだが、ロボ子は外装重視で作ったために金かかる...
よって、インテリ部門用は別ロボを作ることに決定しました。勢いあまって、すでにフレームは完成してたりして...今度は1kg級の小さいのになります。これについては形ができたら別ページで進めていこうと思います。
本日は、ロボ子のスカートを固定するステーを作って、スカートを固定しました。わんだほーでは、オマタさんにスカートをめくられそうになる、というおいしい場面もありましたが、ロボット的には固定した方がよいので。でもスカートめくられそうなシチュエーションがあったら、いつでもヒモ吊りに戻す覚悟。
モーション作成は、練習会の時にやることにして、残りの時間は1kg級の方の作業をやることに。
わんだほーでは相変わらず、異色のロボットが多数でおもしろかった。その中でもおサル2号とドカはるみが印象的だった。ロボ子は当初120cmを狙ってただけあって、ドカはるみにはヤラれた感がある。サーボの違いというよりも、「完成するまでやる」というのが重要ではなかろうか。しかし、金かかってそうで怖い。あと、白風Mちゃんは今回始めて話したけど、だれかの付き添いで来てる子かと思ってた。中学生でKHRを見て、自分でロボットを作って、今はロボットで有名な某大学の学生とか。チクワさんとこのアッキー君とか、確実に低年齢層の参加も増えていいですね。マルさんのとこのキッズもROBO-ONE系その他で活躍してるようだし。
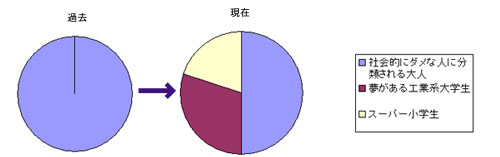
私が考える、わんだほーにおけるロボット ビルダーの分布の推移。
2009/7/18
テンぱってますかー?久しぶりの大会前のバタバタ。やっとなんとか3回に1回は1mぐらい歩けるようになったところです。そろそろ準備をしないといけないので、後は会場で。
お、スタッフは9時半集合。絶対間に合わない。賞品も送ってなかった。ヤバ。もって行くか。よく考えたら、どうやってロボットを持って行くか考えてなかったぁー。急いで家中を探すと。

お、ギターケースが入りそう。甲殻機動隊の人形使いみたいでおもろいな。でも緩衝材を入れる隙間が無いので断念。
ということで準備が終わったので、本日は早く寝ます。明日は早起きだ。
2009/7/17
昨日、野生のうさぎが家の前にいました。かわいいなあ、と思ったら、庭のとうもろこしを食われてた。くそー。ウォレスとグルミットの畑かここは?。野うさぎ氏ね!
あと、タヌキとハクビシンもいるらしいが、まだ実害はないです。タヌキはよく車にひかれて死んでる。

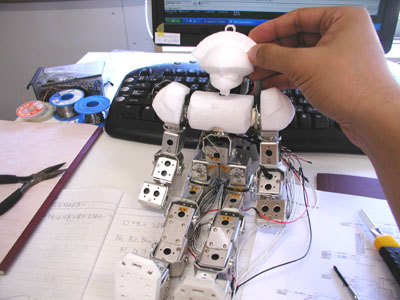
さて、梅雨があけましたね。ここ数日、超快晴。そろそろエレキ系を完成させねば。ということで、今まではAC電源だった部分をバッテリに換装し、ロボット神経システムも本番配線にしました。というか、テスト環境から「シロイノ」のエレキ部を移植。つまりサーボコントロール、センサ入力、MP3音源再生がPCからのリモートブレインでできるようにしました。テキスト読み上げなどは前回のシロイノで作りこんでたので、アプリの変更は一切なしで済んだ。
で、エレキ系が意外とあっさり本番環境に移行できたので、外装系を仕上げます。

ベビーパウダーを買ってきたのでさっそく型からはがしてみる。だめだぁー。重い。形状をキープできるようにかなり厚めに作ったのがだめだった。ということで作り直し。
作り直しを写真に取ったので以下工程を説明します。

まず、2つの石膏型よりも少し大きめのガーゼをかぶせて、平らな面だけ義体用シリコンを塗ります(というかおきます)。このやり方だと厚みが調整できます。厚くしたければたくさん投入すればよいだけですね。側面はまだ塗りませんが、あとで作業しやすくするために、シリコンでちょん止めしておきます。

このシリコンは硬化時間が40分と超早いので、40分前後で次の作業ができます。余分なガーゼを切り取って、2つの型を張り合わせ、ゴムでしばります。

少量のシリコンを混ぜ、側面に投入します。こちら側が固まったら、反対側も同じようにやります。

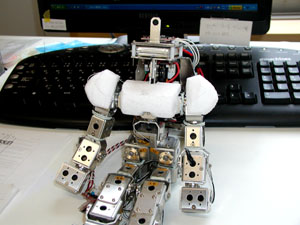
ということでシリコン製胴体の完成。今度はちょっと薄すぎたか?

外装の完成!結構時間かかった。でもひさしぶりの造形作業で結構たのしかった。
やっぱり、足の外装が無いとちょっと貧弱ですね。あと、スカートの取り付けも、本来なら別パーツを作ってきちんとやるところだが、時間が無いのでシリコンにネジ留めしたり、ヒモで吊ったりしてます。後ろスカートはつけられなかった。せっかくのシリコン胴体のシルエットが消えてしまってます。この辺りは時間があるときに修正だな。

上体のアップ。
案の定、外装つけたら歩行がうまくいかなくなったので、またモーションを作らねば。なんとか「ダッシュ」と「ボトルトラクション」まではできそうな気配。
2009/7/14
わんだほーまで一週間をきりました。間に合わないな、たぶん。ということで進捗。

とりあえず出来上がったパーツから色を塗ってみます。マスキングが意外とめんどくさくなかった。直線がおおいから。

胴体ですが、悩んだ末、浅草ギ研で売ってる義体用シリコンを使うことに。マスクラテックスより厚みが出てしまうし、マク状に作ると強度の問題があるが、苦心した末にガーゼを中に入れて強化しました。果たしてつかえるかどうか。このシリコンは硬化時間が40分と、普通の型取り用シリコンに比べて超速いので、すでに固まってますが、ベビーパウダーが切れててまだ取り出せません。パウダーふりながら取り出さないと、シリコン同士やカスがくっつくのです。

現在のパーツ進捗。見えずらいですが、スカートのFRPは全部乾燥しました。顔を塗装したけど、単に原色を塗っただけでかっこわるいが、時間が無いので凝った塗装はできない。もったいない。

本体の方は、昨日あたりからモーション作成に入りました。が、はやり80cm級だとムリがあった。すでにサーボ1個つぶした。このロボットは自腹だからキツいなあ。どうせ120cmが実現しなかったのでもう少し小さいサーボで作ればよかったと反省。。。
今回、腰ロールを入れたので、腰をふりふり、みたいなモーションにしようと思ったが、腰ロールとモモロールが2分ぐらいで超加熱してしまってムリ。軸数を多くしたかいがまったくなし。2分うごかして20分休む、という感じでモーション作ってますが、気が遠くなってきた。しらふではとても無理なのでアルコールの投入を決定。
2009/7/9
肩痛てぇ。マジで。寝れないぐらい。どのぐらい痛いかというと、ケンシロウに秘孔を突かれてそのまま指が入ってる感じ。肩甲骨の裏側あたり。前回は治るのに半年かかったので、今回は真剣に治す方法を考えました。
丸三日間なにもしないで(本当になにもしなかった。精神的につらかった。拷問なみ。)寝てたりしてもだめだったが、ここにきて若干改善。効き目があったのは
腕を吊る
左手でマウスを操作
この二点。
左手というのはわかるのですが、意外だったのは腕を吊ったこと。実は、痛くて痛くて自然に体が傾いてました。それがさらに症状を悪化させた様子。
吊ることで肩の水平度が矯正されて痛みがやわらいだ様子。ということで左手だけの生活が続いています。
で、続き。

6/22ログの胸部のFRPの抜いた後がこれです。FRPはポリ樹脂をしみこませたガラスクロス(ガラスで編んだ布)を型の内側に貼り付けて、かなり強度の高いプラスチックを作るものです。上の写真は4日乾燥させて型から抜いた後、凹部をエポキシパテやポリパテで埋めてヤスリがけしたところです。この後はサーフェーサーを吹いてから細かい番手でペーパーがけをして塗装になります。この手順はガレキや模型と同じですね。

腹部は、発泡スチロールを切削したものから型を取りました。マスクラテックスで作る予定だったので、石膏で型をとったところが上の写真。普通は発泡スチロールから直接石膏で型は取らないが、今回は急いでるのでやむをえず。

2つの型を合わせてラテックスを入れてぐるぐるまわして、石膏の側面にラテックスの層を作り、乾燥させます。と、思ったら、ラテックスが在庫切れじゃないのぉー!浅草ギ研で売ってるのはハリウッドあたりから直接仕入れてるヤツなので、すぐに補充がきかねぇ。どーしよ。困った。
KE-17(型取りシリコンの強度が若干高いヤツ)に布を混ぜて代用するか...

とりあえず、現状はこんなところです。下のCGと同じです。いいなあ。灰色のところはサーフェーサーを吹いた部分です。青はスタイロフォームを切削したもの。スカートは全部切削終わってますが、側面と後ろは現在FRP乾燥待ち中です。
足は前回の練習会のときにイガアさんに言われたとおりに、とりあえずでかい足裏に変更しました。小さい足裏でいきなり作って時間をつぶすよりも、でかい足裏で確実に歩くのをつくってから小さくするのがベター、ということです。
外装はまだありますが、これ以上ハマると、わんだほーまでにかんじんの機体が動かないということになりかねないので、外装はここまで(下のCGの範囲まで)で凍結。そろそろプログラムに入らないとマズい。
2009/7/3
2週間ぶりのアップです。実は持病のマウス症候群が再発してしまった...が、製作の方は地道に続いています。わんだほー7にエントリーしました。28日はちょうど寝込んでいたのでエントリー忘れててあぶなかった。今回は40名だったので3日遅れでエントリーしてもなんとかセーフ。
マウス症候群=五十肩とも言われるらしいのですが、肩こりとかそうゆうレベルでなくて、じっとしててもかなり痛い。一番良いのはマウスにぎらないことなんですが、CADやってると絶対ムリ。現在、真剣に足マウスの導入を検討中です。マジで。みなさんもお気をつけて。
進捗は、
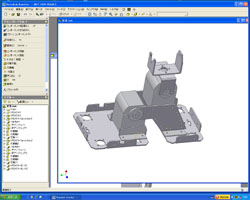
データはここまで終了。裏側もできてる。足は変わる可能性もあるので次は手のモデリングかなあ。
顔−>ろぼとまの創る造で製作済み
肩−>ろぼとまの創る造で製作済み
胸−>をFRPキャスト中
背中−>型取り終了FPRキャスト待ち
腹−>原型の切削終了型取り待ち
スカート−>原型切削中
という感じ。
スカートは平面が多いので、他の部分よりも切削時間が短くて、1パーツ1日のペース。その他は分割で切削したりして1パーツ2〜3日ぐらいかかってます。FRPも乾燥に時間がかかるので、造形関連は今週中に全部FRPまでもっていかないと間に合わんなあ。
腹部ですが、よく考えたら折れ曲がるのでFRPは不可。マスクラテックスで円筒状態のゴムの物体を作ることに。ということは型の最後は石膏である必要がある。きちんとやるなら発泡原型−>シリコン型取り−>レジンキャスト−>表面修正−>シリコン型−>シリコンキャスト−>石膏分割型となるんですが、チョー面倒なのでいきなり発泡−>石膏にすることに。表面が汚くなる感じですが、時間が無いのでやむをえないです。
とりあえず、明日、明後日で集中してやらないと。(今日は仕事中)
2009/6/22
週末は関東ロボット練習会でした。今回は会場がろぼとまで、「創る造」に申し込んでおいた顔部分を受け取りました。

こんな感じ。後ろの発泡スチロールは後頭部を簡単に作ってみたもの。なかなか良い感じ。サービスは「サポート材除去なし」にしました。サポート材はABS材にくっついてるが、ABSより強度が低いらしく、手でパキっとやると取れます。が、初めてだとABSも壊しそうでちょっと怖い。ビビリながらやってたら手を切ってしまった。軍手必要です。でも、思い切ってやってみたらきれいに取れました。
サポート材除去を頼むと、アルカリ性の溶液に入れて、超音波洗浄器に一日入れるらしい。ということで結構手間がかかるので費用もお高い。サポート材除去は、よっぽど入り組んだ形状でないかぎり頼む必要は無いと思われた。
練習会では、ダイナマな杉浦さんや、コイズミさんがCAD詳しくて、いろいろと教えてもらいました。どちらも本職でバリバリ3DCAD使ってるみたいですね。ライノはやはりstl化が弱いらしい。
IGES出力ならエラーが少ないらしいが、創る造は今のところstlのみの対応。サーフェースをオフセットなどでソリッド化したときに、つなぎ目が切れる、というのはよくあるらしいが、対策をきいたところ「裏にもう一面作る」とのこと。やはりそうなのね。

さて、本日も合間を見て作業。前回作ったチチ部分を発泡スチロールで切削してました。手持ちがMDX−20なので高さがあまり出せないので、35mmぐらいで水平にカットしたデータを削り、それをボンドで接着してます。で、とりあえずFRPにしようと思います。この写真はつなぎ目をねんどで消してるところ。

ブロックで囲いを作り、隙間に端材(いらなくなったシリコン型などを切ったもの)を詰めます。

シリコンを投入します。シリコン節約法はいろいろありますが、私の場合は、作業時間(シリコンが固まり始める時間)終わりぐらいに、そこにたまったシリコンをすくい上げて持ち上げて表面を厚くしています。上の状態ではゲル状になっててすでに垂れない状態です。この方法を取る為、私は流動性の低いシリコンを使ってます。メインはKE−17。KE−17はあまり評判よくないですが、私は小さいフィギュアのような精密な型はあまり取らないので問題ナス。強度が若干高いのも好き。底にたまった沈殿物をよく攪拌する必要がありますが、筋トレだと思って毎回やってます。
シリコン節約法については今回のロボコンマガジンに田中さんも書いてますね。私は本来はこの後、FRPで裏打ちするのですが、田中さんは石膏でやってるみたい。なるほど、その方が速いっすね。ということで固まるのを待つ。

データの進行状況はこんな感じ。肩はミラーを使わないで、ロフトだけで作ったら一発で問題ないstlをはいた。やり方だな。
2009/6/18
バスト部分はサクっと作れたが、案の定、stl化がうまくいかない。

とりあえずサーフェースを作って、絶対にソリッドになるであろう形でフタをした。これでstlで読むと問題ない。
で、問題ないソリッドの表面を分離し、
内側にオフセットする。
内側2mmの厚(緑レイヤ)で皮ができてるハズなんだが、これがエラーになる。なぜだろう。
念のため、内側を手動で貼ってもダメ。表面抽出するまえはエラーが出なかったのに、サーフェースにすると胸の中心線にそって目に見えない隙間が空いてしまうようだ。隙間はクリックできないのでなんともできない。
サーフェースの解析でもまったく線などでないんだがなあ。stl化特有の”仕様”なのか?ググると同じようなことでハマってる人が多い。ジュエリーデザイナーが多いのが気になるなあ。工業系はやっぱソリッド系CADの方がいいのか?でもライノだと、微妙な曲面が超簡単に作れるのでこれでなんとかしたいなあ。
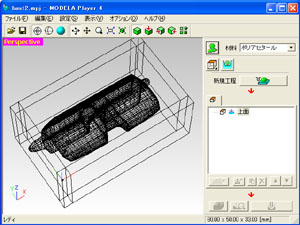
という感じでハマってます。胸部はstlビューワー(miniMagic)で見ると問題あり、なのだがモデラプレイヤーで表示させたところ問題ないようなので削ってみて具合を見てみます。でも、モデラプライヤーはオープンエッジ(ソリッドでない)があってもエラーでないからなあ。
2009/6/17
やっとフレーム仮組みが終わった。

正座させたい為だけにムダにヒザ二重関節になってます。ここまでで3kg。数値的には思ったより軽いが、持った感じでは結構重い。特に腰ロールとピッチがこれで支えられるか不安です。これで動くかは神のみぞ知る。
フレームの設計思想としては、剛性最優先で設計してます。今までの反省を生かして。
外装の方ですが、前回作ってろぼとまに送ったデータにエラーがあるとのこと。で、stl化したデータが使えるかどうかを調べるツールを教えてもらった。
MiniMagicsのページ
これで表示させた時に、「エラーがあります!」と表示されるとNGのようだ。確認した結果、原因がよくわからないのだが、ライノは基本的にサーフェースモデラなのでそれとソリッド系の加工システムのマッチングがあまり上手くいかないようだ。特に、お面のようなものを作る場合、ライノ的にはサーフェースをオフセット(ソリッド指定オプション)した方が簡単に作れそうなのだが、これだとNGの様子。試行錯誤の結果、表面のサーフェースと別に、内側にも同じようなサーフェースを創って、ギャップをサーフェースで埋め、最後に結合させると上手くいった。初めからソリッドを意識して作れば問題ないような気もすが。まだまだ修行が足りん。
ということで、今度はソリッドを意識しながらバスト部分をモデリング中。サーフェース毎にソリッド化し、ソリッド化するたびにブーリアン和を実行して上のソフトで確認、という段取りで進行。
2009/6/12
ライノ続き。
だんだん、ライノの欠点もわかってきた。といってもたいしたことないが、履歴修正ができないんですねこれ。たとえば、曲線からサーフェースを作って、その後曲線を直してもサーフェースは別物なので変化なし。一度オブジェクトを作って微調整する場合は曲線をもとに作り直し、という段取りらしい。よって、ファイル保存とか、レイヤーとかの機能が強化されてます。フォトショップなんかを使い慣れてると、逆にこちらの方がやりやすいという方もいるかもね。
で、今はお試し版なので保存が25回しかできないので結構緊張しながらやってます。あと、描画とかかなりスムーズなんですがそのためかCPUパワーがものすごく食うようで、今使ってるPCのメモリがあまり無いヤツなのでたまーに「リソース不足です」が出ます。これが出たら保存しないわけにはいかない。早く製品版がこないかなあ。
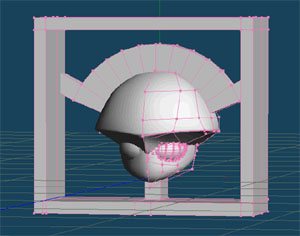
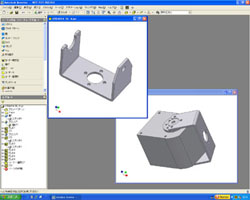
早朝、子供に早く起こされたので続きを。ここまでで+2時間ぐらい。ソリッドデータを、表面だけ残したサーフェースに変換し、2mmオフセットして再ソリッド化。お面のようなオブジェクトが完成。
メタセコのローポリ本にもよく載ってたけど、「アニメとかマンガの下絵を立体にしようとした場合、かならず矛盾するところが出てくるので下絵はあくまでも参考程度」、と書かれていたがそれがよくわかった。上のモデリングは正面から見たところを重視してます。Rとかを正面にあわせると、どんなに修正しても側面から見たときに大きく形がかわります。また、正面から見た絵の印象では顔は平らな感じですが、正面と側面の曲線をもとに描画すると下からみた形が三角になってしまいます。ということで、形そのものを作るというよりも微調整にかなりの時間がかかってます。
内側には取り付け用の構造材風なものも配置。穴位置などは正確な値になってますので板金パーツとかでネジ留めできる。ということで早速このデータをstlで保存し、創る造サービスに送信しました。どうなるか??
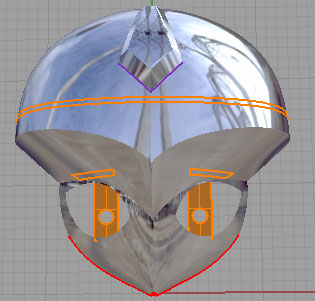
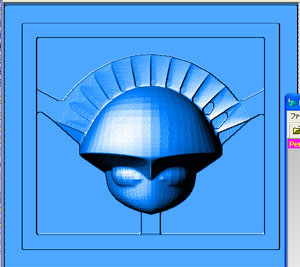
これは、「環境マッピング」という機能を使ったところ。サーフェースに異常が無いか、面に画像を映して確認するというもの。面が切れているところが無いかどうかがよくわかります。
オレンジのは裏の構造材のレイヤが出てしまってるところ。意図せずして眉毛みたいなのが付いてます。眉毛付けてもいいなあ。といったら作者におこられそう。目の穴はイメージセンサ(ギ研のS−EYE)を仕込もうかなあと。
2009/6/11
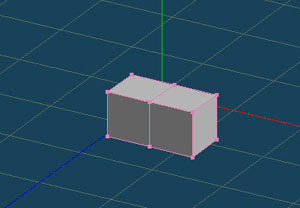
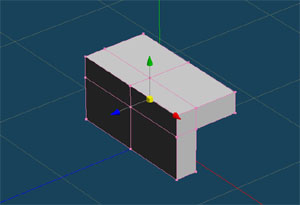
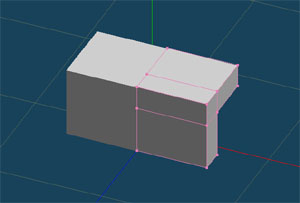
ヒマをみて、ライノの修行中。3日間でチュートリアルと初級本一冊をクリア。で、大体わかってきたので早速作図してみました。
おおー!簡単、簡単。メタセコではポリゴンをクリックしまくりでなんとかそれっぽい形にしてたが、こちらは上の状態までで何と曲線描画が3本だけ。超ラク。
上の状態は下絵を貼ってサイズを合わせるのに20分ぐらい、作図でで5分ぐらい。ソリッドデータになってますが、後でサーフェースやポリゴンにもできる。
やっぱり、きちんと初級本とか読んだのが正解だった。正しいやり方を覚えればかなり速く作れると思う。もうちょっと修行してみよう。ちなみに本は
最強のモデリングツールライノセラス入門 是枝靖久著
をやりました。機能が多すぎるので全部は紹介されていないが、コレにある機能だけでおそらく普通のものは作れると思う。ハマりそうなポイントが沢山解説されているのでまさに入門によい。あと、
Rhinocerosオフィシャルトレーニングブック WORKS CORPORATION
を買ったのでぼちぼちやってみよう。こちらは機能の意味を詳細に解説してある。中級向きか?
6/20練習会までに顔の出力が間に合いそうな雰囲気になってきた。
2009/6/9
CGソフト検討中つづき。で、今確認しているのはRhinoceros。18万円。ちょっと個人や趣味で買うには高いソフトだが、今のところ一番イイ。なにせ、工業デザインを考慮されている作りがロボット作成に良い感じ。操作性もちょっとイジってみたところ問題ない様子。
メタセコでは出力ファイル(dxl出力)がおかしかったのと、ブーリアンがうまくいかないのが問題になったのでそのあたりを検証したところ、ブーリアンは上のように曲面モデルと直方体の差を取ったものが上手く意図したとおりにできた。
寸法も数値入力で入れられるので、正確な形も作れそう。出力もstlサポートしてたので、ろぼとまの3Dサービスにデータをそのまま送って造形できそうな感じ。というか、Rhinocerosはろぼとまから教えてもらったので、ろぼとまでもこれを使って確認している可能性がある。
shadeとかメタセコで、ファイル変換に苦労(もしくは変換用にソフトを購入)するよりも、ちょっと高いがコレ買ったほうが安くすむような気がする。
ということでRhinoceros本格導入を検討中。現在、評価版を使っているが、25回までファイル出力できるので、6/20の練習会までにはロボ子の外装の一部でも出力しておきたいなあ。
2009/6/6
全然すすんでませーん。仕事と違い、趣味ロボの場合は拘束条件が少ないのでなかなか。ということで大会参加という拘束条件を自分に。
今だと、7/19のわんだほーと、7/18のロボスターかなあ。1.5ヶ月という微妙な期間がまたなかなか。
ということで、前回は作り直しか?と思いましたが、これらに参加するにはもう設計している時間が無いので、5/19の設計でいきます。板金はウッチーにヘルプ。すまん。私の課題は
1)ロボ子外装を完成。できればソリッドデータで作る。
2)ドロッセルのような動き
3)センサー活用
を最低限。できれば、前回わんだほーでしまけんさんがやった、ダッシュの自立制御。まあ、時間が無いので今回は難しいだろうなあ。ロボスターに出るなら、MP3ボード付けて歌わせる感じか?曲が無いなあ。吉日ブギウギ歌わせて次の日の告知を大阪でしてくるというのもあるかな?
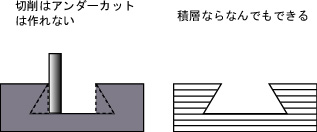
外装といえば、ろぼとまで「創る造」という3D出力サービスが始まるようですね。次回の関東ロボット練習会がろぼとまなのでその時までに始まってないかなあ。外装はギ研にあるモデラで切削しようとおもってたけど、創る造ならアンダーカットとか気にしないでいいので自由なデザインができるし、おそらく自分でやるよりも速いだろう。ABS材をニューっと出して積層するやつらしい。
あとは、どうやってデータを問題なくstlにするか、だ。メタセコがデータが作りやすかったが、ソリッドデータへの変換が上手くいかない。Inventorでやるか、ソフトを再検討するか。時間が無いなあ。
とりあえず、6/20の練習会までに外装データを作るというのを目標に、本日はCGソフトの再検討をすることに。確認はモデラ付属のモデラプレーヤー上で表示させてみます。ということで今日はここでさようなら。
2009/5/24
昨日は関東ロボット練習会でしたのでその様子とメモ。
私は、前ログのフレームが間に合わなかったので、前のロボ子足(120cm版の足部だけ)をもって遊びに。イガアさんあたりに聞けば、ひょっとしてこれでモーション歩行できるかも、というのを課題に参加しました。
<ロボスポ編>
今回は分散開催でした。イガアさんに接触する目的でしたのでまずはロボスポへ。特急電車にのって昼に到着。近藤社長がいてビックリ。案の定、イガアさんとGIYさんが来てたので、「これ歩きますかね」と持ちかけ、いろいろと話を。で、とくになるほどと思ったのは、イガアさんに、「こうゆう長い足でパワーが無い場合は、足を交差させて歩くのはどうか?」と言われ、なるほどなあ、と。デカイのを作っている方々は、まず、足首ロールのトルクが弱くて悩むらしい。特に、一般的なヒザ曲げ歩行の場合、左右に重心をかけるのでその時に足首ロールがたえられなくてクニャっとなるらしい。あと、ヒザ曲げ歩行だと大きいロボはかなりヒザにくるらしい。ということで下の図。
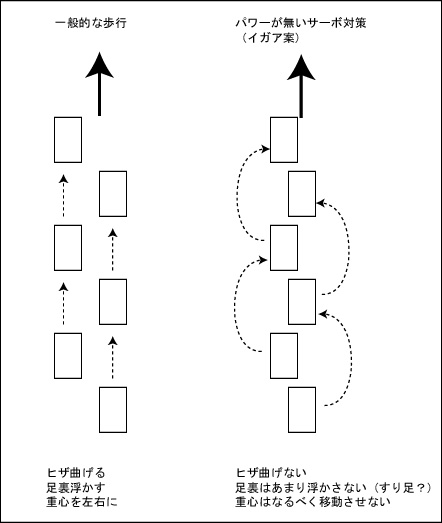
つまり、足裏の機動は左右に振るが、重心はあまり左右にふらない。ヒザも伸ばした状態で、トルクがあまりかからないようにする、という方策。ロボ子120cmはうごかなさそうなので60cmに縮めてるという話をしたところ、GIYさんもイガアさんも、工夫すれば120cmはいける、ということでやはり工夫して120cmでもう一回作り直す方向に傾く。
ウッチーとろぼとまで14時に待ち合わせしてるのでとりあえずセットアップまででロボスポに放置。
<ろぼとま編>
ろぼとまでは、ウッチーに曲げのコツを教わりに。到着すると、電気通信大学の方々と岡田社長が談話中。電通大はハードからソフトから自作で、やはり頭いい大学は違うなあ。WiiのリモコンのデータをPCに取り込んでたりしておもしろかった。PC画面に加速度を表示させてた。Wiiコントローラ2個持ってロボットを操縦したらおもしろそうだなあ。
岡田さんからは、ラピッドプロトタイピング(細いチューブから樹脂をニューっと出して立体を作るヤツ)のサンプルを見せてもらった。どうやら近日中に導入するらしい。ということは、CADデータを送れば、外装とか出力してもらえるサービス、とか始まるのだろうか。楽しみー。ソリッドデータの中をスカスカにする機能もあるようで、こぶし大のサンプルもあったが、中は蜂の巣みたいになっててかなり軽い。
そうこうしているうちに、ウッチーが到着。前もってろぼとまで切削しといてもらった2mm厚のアルミパーツをまげてもらいました。曲げのコツというよりも、ろぼとまにある曲げ機を使えば簡単にできる、という内容だった...以前、浅野師匠た「赤いヤツで曲げてんだよ」、と聞いた「赤いヤツ」を使ってみる。これイイ!!でも価格が高い。30万円か。曲げ機に30万円は使えないなあ。ということで、曲げはろぼとまで、ということに。
もいっちょ値段の話。電通大と岡田さんと、CADの話に。で、電通大は何を使ってるかというと、ソリッドワークスだった。他の人からも、価格を考えなかったら、ロボット作成にはソリッドワークスが一番いいんでない?ということを聞いた。やっぱソリッドワークスかあ。でも100万かあ。宝くじで130万当たらないかなあ。メタセコ使ってる学生の方も居たが、立体を作る目的としてはやはりメタセコは微妙らしい。
で、ウッチーに曲げの手本を見せてもらって、自分でも曲げてみて計測。おおっ、ウッチーが曲げたヤツは誤差0.1mm。プロ。あと、ウッチーは最近何をやってるかというと、板金でガンダム作ってました(石川さんのページに写真あり)。あたま見せてもらったけど、あまりにもすごくて笑った。ガンプラみたいだがアルミ製。(笑)
<テクノロジア編>
秋葉に帰り、石川さんたちはなにをやってるんだろうと思ってテクノロジアへ。石川さん、平野さん、まさゆきさんが新郎新婦ロボを作ってた。梓さんとさとみ嬢が結婚するので作ってるとのこと。すでに結婚してなかったっけ??
そういえば、梓さんのロボットの「あずさ1.75号」はいつ2号まで昇格するのだろうか。
<RT編>
本日のもう一つの目的でもあるしまけんさんに4000番でICSを使う時のポイントを聞きに。最近のしまけんさんのロボはメリッサベースになってる。ICSの電気的な話を聞いた後、計算歩行の話へ。しまけんさん、c4cronoさん、アミエさんと私のおっさん4人で制御歩行とフレームの話で盛り上がる。いろいろと有用な話が聞けた。こうゆうのは現場(Webでなくという意味)でないと話が発展しないんだよなあ。これを読んでる練習会バージンのビルダーの方は絶対に参加をお勧めします。片や、フレッシュな学生さん(おそらくサレジオか電大)達がいっしょうけんめい練習してました。ちなみにc4cronoは「チクワ」と読むことが判明。
もう一つ、小田さんのKinoの足首ロールが長穴という話を聞いて、小田さんに見せてもらった。普通、あの手のサイズだと長穴という発想はないと思うが、サーボサイズを落として小さくした上で、長穴を使用している。なるほどなあ。長穴はでかいロボット対策だけでなく、小さく作るのにも使えるということだなあ。話を聞けばあたりまえだがなかなか気づかない。ちなみに、サーボはピルクスのPRS-DE07MSで、長穴でトルクを3倍(摩擦除く。)に。DE07NSがトルク約7kgcmだから、20kgcmぐらいになるという感じ。普通サイズのロボットで全然問題なし。
<打ち上げ編>
いつも通り「ひろし」で楽しい飲み会。道楽さんが事故って本日退院なのに飲みに来てた。まさゆきさんがただの変なおじさんでなかったことが判明(「ただの変なおじさん」でなく、「なかなかやる変なおじさん」だった)。城間くんんがカゼ&マスク姿で登場してブーイング。となりの外人が興味深々でこちらを見てたのでKENTAくん達その他が店内でバトル開始。
そんな感じで夜も更けて。
<結論>
もっかい作り直し。
2009/5/19
スカパーのアニマックスチャンネルで、アニメの最終回特集をやってたので、マクロスFの最終回数話を見ました。マクロスFは話は聞いてたが思ったよりおもしろかった。しかし、はっきり言って、オープニングの曲(後半版)はシェリルよりも絶対に平野さんの方が上手い。間違いない。
さて、わんだほーとか、関東練習会に出ていると、どうしても動くのが欲しくなってきます。実験ばかりだとモチベーション上がらない。ということで、急遽120cm版は凍結して、動くであろうサイズのものを作ることにしました。基本的に私の役割は、外装がメインなので、動くものを作って外装を気持ちよく設計しよう、と。
作り直しばっかりで、私もサグラダファミリアの仲間入りの様相。
手持ちのサーボが4014なので、それでフレーム設計してみました。無理やり比率をあわせて作ったのが下の図面。
首までで640mmあります。でも、今までの感触から、これなら問題ない(動かしやすい)でしょう。前回、剛性が問題だったので、このフレームは2mm厚にしてます。バトルや運動性能よりも、制御剛性を高めてきっちり動かす方向です。中抜きもあまりしてません。バッテリが胸なので、重心はやや高めだと思いますが、制御歩行されてる方々の話だと、重心は上の方が良いとのこと。
歌って踊れるようにもしたかったので、軸数多目にしてます。ここまでで32軸。あと3〜5軸増える予定。胴体に3軸使ってます。ポージングには特に腰ロール軸が重要ではないか、と。ドロッセル風に立つために。つま先ピッチ軸もあるので、つま先立ちもできます。つま先立ちは基本だなあ。イカさんの話だと、踊るとどんどん立ち位置がズレる、らしいので、こんなにデカくて本当に踊れるかは神のみぞ知る。軸構成的には踊れるハズです。
また変更になるかもしれないということで、板金コストをおさえたいので今回もろぼとまさんで切削してもらって、自分で曲げる予定。と、思ったら、ウチのインベンターがおかしくてDXFで出力ができん!!なんか前回もこれにハマったような...ということでウッチーにヘルプしたところで本日は終了。
あ、足首ロールの長穴試すのを忘れてた。
2009/4/29
わんだほーぷちにスタッフとして参加してきました。今回もおもしろかったし、いろいろと情報も聞けたなあ。わすれないうちにメモメモ。
1)長穴
K(クボ)さんのGATの足首に長穴がついていたのですが、長穴軸を触ったのは初めて。思ったよりもガタがすくなくていいなあ、と。でかいロボットの足首ロールにはこれが有効だと思いました。
一瞬、「全部長穴にすれば、ショボイサーボでもデカイロボット作れるのでは?」と思いましたが、動作角が少なくなるので、動作角が少なくてもOKなところしか使えない、と。
前田さんのところで長穴は知ってたのですが、思った以上に使える感があった。ギ研版ロボ子にさっそくイタダキ(の予定)。
2)現場の空気、と九州
九州が熱いみたいですね。打ち上げでは、柳さんに「ヒロポ○」と間違って呼ばれてマジ切れしたホリポンさんと、メリッサのメーカーで有名なクラフトマンさんと同じテーブルで九州の現状の話が聞けました。体長からは「九州熱いぜ」という話は前に聞いてましたが、そういう空気みたいなのは実際の現場でないと感じないもんですね。「九州が強いのは、関西に負けたからだ!」と。こういうのは、実際に話たりしないと空気が伝わらないものだなあ、と再認識。
3)足裏が点
イガアさんと話をしてて、足裏の話に。制御するなら足裏が重要という話の中で、足裏は点がいいのでは?ということでした。たしかに、制御歩行を目指して足裏の床反力をセンサーで測定するなら、点で測定した方が床の外乱に強いかなあと。さすが、マジ系の方はロボットをよくわかってる。ガルーの足裏がH型になってるのもそうゆう理由だとか。
4)4より6
今回、多足もOKだったのですが、6足で出場のしまけんさんと話したところ、内容にもよるけど4足よりも6足の方が簡単に計算歩行できるのではないか、ということでした。アイボも歩行はゆれるような制御をいれたりして結構むずかしいことをやっているとか。最近、ちょっと浮気して4足作ってみようかなと考えてましたが、この話を聞いて(今のところは)やめました。
ちなみに本日のわんだほーでは、予選上位4人がバトルすることになったのですが、しまけんさんの6足が4位以内に入ってしまい、イガアさんのロボとバトルすることに!!いやー笑いました。結果は散財さんのところあたりで見てくだされ。
5)若さ、と行動力
11才、12才、すげー。若いと集中力あるねー。初めてマイコン(マイクロコントローラでない、パソコンという名前が生まれる前のマイコン。シャープのMZ80K2E)を買ったのが12才だったのを思い出した。町のマイコンショップに同士がたむろして情報交換、という世界があったが、今のホビーロボットと重なるところがあります。でもそのころのシャイな私は大人と話できなかったなあ。
6)キャラクター
今回のわんだほーはビックサイトで行われ、ノン気の方々が沢山観戦に来たわけですが、GWともあって子供連れが多かった。スタッフをしていたので選手よりも観客に近い場所にいることも多々あったのですが、そこで思ったのが「キャラクターあるロボットは人気高いなあ」と。女の子にはまりんがすごかった。ぬいぐるみだもんなあ。あとは虎華。男子も含む一般子供はサイコロ(のサイコロ競技の時)、マヌイ、
Kinopyあたりか。サイコロのサイコロ競技は鉄板だなあ。
7)黒アルマイト
アミエさんのところでアルマイトをやっているのは知っていたが、サンドブラスト処理をした上でアルマイトすると色が濃くなるというのを知った。かなり前に仕事で他の会社に黒アルマイトを頼んだら、うすーいクロームのような仕上がりになってがっかりした経験があった。今度はアミエさんにおねがいしてみようかなあ、と。
そのほか、大同大学、法政大学、東京理科大学、の大学勢もがんばってました。しかし、小学生の次が大学。中学生とか高校生は受験とかで大変なんだろうなあ。真ん中が抜けてる。ちなみに、幼稚園ですが、28日は平日で、子供は幼稚園生ぐらいの年きか来なかったんですが、体験操縦をすすめると大半が「こわい」ということでした。幼稚園はまだ早いんだぁ。
スタッフをやってたので良く見られなかった機体や、打ち上げで話せなかった方も沢山いますが、本日印象に残ったのはこんな感じでした。今後のロボットつくりに役立てよう(またパクりか?)。
PS:そういえば、人形使いさんが居なかったなあ。スピーカーから声は聞こえていたが。
2009/4/11
明日はわんだほーぷちのエントリー開始日ですね。機体が無いので参加したくても参加できねえ。。。前回のわんだほーに参加したシロイノは他の実験の為、頭部のみ稼動中なんです。miniロボ子も作り直しになったしなあ。
と思ったがまてよ?そういえば放置プレイ中のフルサイズロボ子の足があったなあ。ということで本日土曜日中にこれで歩行できたらエントリーしてしまおうかなあ、ということで。

4時、作業スタート!(爆)
写真は5時ぐらいです。
老人か?
まず、前回の歩けなかった要因の一つに、「フレームの剛性が低すぎる」というのがありました。自分ではなんとなく意識してましたが、「4月からテクノロードと合併したKORKSの浅野」師匠に、軸まわりとスネがネジれると指摘されまして、よくよく考えるとそうだなあ、ということでこの辺りを強化してみます。
<8時>
スネ部分にトラスを入れて、軸受け全部に自作ワッシャーをかませたころ...おお!歩きそう!
前回と同じデータを送ったところ、足がクロスすることはなくなりました。片足立ちも問題ナス! そうかー、剛性を見直すだけでこんなに違うんだなあ。大きいから先端にいくほどゆがみがたまるんだなあ。としみじみ思った。
<10時>
重量が重いのでモーション作成が大変。上腕筋が限界に来たので作業体制を見直すことに。アレだね、ホンダのPシリーズのように、天井にパイプだな。ということでホームセンターに材料買出しへ。
<11時>
S字フックを買い忘れてホームセンターへ戻る。缶チュウハイの緑のヤツ(最近ハマってる)が安かったので大量に購入。あと、本日はタイが沢山上がってるようで、タイも安かったので購入。自分に負ける雰囲気が...
<12時>
天井パイプできました。
 天井にパイプ、&チェーン 天井にパイプ、&チェーン
 モーション作成中 モーション作成中
こんな日が来ることを想定して、事務所つくるときに無駄に太い梁にしてました。これでヨメに文句言われない。
<午後>
週末に考えられる数々の割り込みが発生し、作業を断念。。。二件隣の人と世間話をしたところから、三件隣、四件隣、五件隣、義理の弟、植木屋さん、となりの外人一家、裏のおじさん、義理の弟の母と妹と集まり、最終的には飲み会に。
その後、散歩しながら取った山菜のてんぷらを食ったところで終了。 たけのこ、イタドリ、タラの芽。うまかった。
<次の日朝>
朝7時、エントリー開始2時間前。全然歩行できてません。
<エントリー30分前>
だめだー。そもそも、こんなにガタの大きい足でモーション歩行なんて無理無理。一歩ごとに着地位置や姿勢がかわる。フレーム強度はこれ以上やってもあまり改善されないと思うので、後は制御でなんとかするしかないなあ。となると後二週間で歩かせることは不可能に近いので、エントリーはあきらめました。
わんだほーぷちは、観客の側で楽しみます。
2009/4/5
キター!二瓶勉先生の次回作。次のアフタヌーンから掲載されるらしい。予告通り、宇宙でロボットもののようだ。地球滅亡後に宇宙に散っていった人々の話らしい。マクロスっぽい。無限の住人がもうすぐ終わるのでアフタヌーン買うのやめようかと思ってたが。
最近、ロボットマンガでいいのないなあと思ってたら、探せばありますね。月刊誌が沢山出てるのでよくわからんかった。現在、コンパイルにすごーく時間がかかるチップを使ってまして、その間ヒマなので読んだこと無い月刊誌を買って読んだりしてたんですが、最近のヒットは「機動旅団八福神」と「正義警官モンジュ」。
さて、ロボ子(名前変わらないようです。)ですが、前掛け(スカート?)を作りました。両サイドのスカート部も設計は終わってます。
今回、色がちょっと違いますが、スタイロフォームの白いのをつかってます。目が細かいのがネットで売ってたので購入、テスト。普通の発泡スチロールより切子がかたまってるので掃除しやすいです。あと、静電気もあまり出ないみたい。普通の発泡スチロールは、削ると静電気がすごくて、掃除機で吸う前に手とか壁とかに付いてしまって掃除が大変だったのです。
と、ここで少々問題が。萌え軸のヨー軸ですが、あまり負荷がかからないと読んでたのですが意外と負荷がかかることが判明。まだテスト中(片足立ちで自立で重心を取るという実験をしている)で歩行すらしていないのに交換2回。また、股間のピッチ軸が、足の重さに負けてしまうことがあって完全に上に上がらない場合がありました。
まあ、制御して駆動すれば問題ないと思われますが、サーボパワーには余裕を持ちたいなあと。機体重量700gで24軸でサーボトルク2kgfcmだとけっこう限界のようです。
いろいろ悩みましたがサーボを変えることに。つまりフレーム全取替えとなりました。4/29の「ぷちわんだほー」に出たかったのだが、作り直した方が完成度の高いものになるなあと。ということで次回からまたフレームの話になりそうです。というか大型ロボットはどうなった?と言われそうですが。大型は良いサーボが出そうなのでそれ待ちということで放置プレイ中です。
終了間際に息子が入ってきて一言、「このろぼっと、かっこわるいねぇ。ひかるほうちょうがついてないよ。」と言われた。光る包丁はビームサーベルのことだと思われる。おまえもファーストガンダム世代の遺伝子を受け継いだか。
2009/3/19
さんそうけんが女の子ロボット作りましたね。二千万円かあ。予算二億かあ。もっと庶民的なパーツ使えば安くつくれると思うが、研究なので究極を目指さないといけないわけね。
予算気にせずにロボット作ってみたい!
と、冗談はさておき、ロボ子の外装が進んでます。ちなみに、名前がロボ子から変わる可能性が出てきました。理由は「なんとなく」。
で、あいかわらずメタセコでモデリングしてます。頭裏側のエンボス(基板とかが入る凹)を、今回は「ブーリアン」で作ろうと思いました。で、教科書本を読むと「プラグインを拾ってきて」とあり、URLが出てます。
で、探すこと小一時間、本のサイトは閉鎖されており、どこにも落ちてないなあとあきらめたところ、なんと今のバージョンでは標準装備でした...
で、(頭)−(フレーム)みたいに演算させて凹を作ろうとしたら、合成した後に凹も曲面が適用されてしまった。このような方法には使えないのね。もしくはもっと処理を重ねる必要があるのか...
で、結局めんどうなので、凹は後でカッターで削ることにしてガイドだけ彫ることに。
と、ここで問題発声。カチューシャ部分を円柱の基本図形から作ったんですが、dxfにすると変なくぼみが。なんだこりゃ。円柱の基本図形は平らな部分が三角面なんですが、その関係かなあ。CGと現物と違う形になるのはびみょー(もしくはまだ使い方がわかってないか)。面倒なのと、作り直しの可能性もあるので、今回は特に追及せずにこのまま切削することに。
こんな感じ。曲面が多いので、発泡材でも仕上げに9時間かかりました。MDX500あたりだともっと速くなるのだろうか?エンドミルの径は今回から軸径4mmに変えてます。スピンドルも4mmに変えた。4mmの方がこのぐらい小さいものだと刃の種類が多いので良いです。今回は、面だしが刃径4mm、荒削りと仕上げは両方刃径2mmでやってます。軸径4mmだと刃径0.3mmとかあって、スクエア刃で削っても曲面とか全然段差がわからないぐらいに仕上げられます。(が、時間かかる)
頭部はバッテリを入れようと思ってましたが、この頭の大きさだとバッテリ入りません。デザイン優先で、バッテリは背中にもっていくことにします。
白いとドロッセルお嬢様みたいですね。w 強烈に腰ロール軸入れたくなってきた。ドロッセルの基本立ち姿勢は骨盤が斜めですからね。そういえば、ろぼとまのチキチキでも腰ロール軸を多数見かけたなあ。今週は日曜日ね。要チェック。
2009/3/14
今日はろぼとまでチキチキですね。みねば。最近、地上波が映らないこともあってますますTVみてないんですが、はっきり言ってTVなんかより全然面白い!知ってる人が沢山出てきますしね。ということで今から楽しみ。
さて、肩の切削終わりました。こんな感じ。肩がでかいのか、胸が小さいのかわからん。胸を大きくしよう。そうしよう。

横からみた感じ。同じパーツをミラーしたものを合体させてます。なんか変な形だなあ。「素人がCGモデリングすると立方体や円柱の造形になる」とメタセコ本に書いてあったがまさにその通りですね。正面図しかみてないので正面からみるとおかしくないが横から見るとおかしい。と。勉強になった。
現在まで、CG本6冊読みましたが、一番よかったのは「Metasequoiaスーパーモデリングガイド かこみき著」です。マニュアルとして使えるのはこれだけでした。その他は「おれならこうやって作るぜ」風なものが多い。が、それはそれで参考になります。
全体のバランスを見てから作り直しした方がよいと思われるので、これらはまだこのまま仮ということで放置。別な部分の切削に入ります。腕か胴体か。胴の方が簡単そうだ。
メタセコのシェアウェア版のライセンスが来たので、これからはプラグインもつかっていこう。
2009/3/12-13
スタイロフォームが無いのでとりあえず手元にあった発泡スチロールを削ってみました。いい感じです。ちょっと横方向に短かったのですが、データ化してるので修正は簡単。
次に肩部分の設計に入る。まだメタセコの使い方がよくわかってないので形が美しくないですが、1回作り直してやっと破綻面がなくなったので、様子を見るためにテスト切削してみます。
と、思ったら、メタセコ上では問題なく表示されているのにdxfに変換するとなぜか原点に集約する線が...書籍を何冊か読んでみると、メタセコは基本は四角面で描画するそうで、三角面があって、ある条件になると見た目OKだが破綻している場合があるようだ。
ということで、極力三角面を使わないでもう一度同じのを作り直しました。三回書き直し。
現在12日の昼。本日は用事があるのでここまで、あとはデータをセットして切削させます。シュミレーションだと面だし30分、荒削り1時間、仕上げ6時間なのでこのまま放置して、明日には削れていることでしょう。
一夜明けて13日。

削れてましたー。この後、裏面の切削に。シュミレーションしたら、荒削りまでで1時間ぐらいだったが、仕上げが9時間だった。仕上げしろは0.3mm設定ですが、こんな部分の0.3mm誤差なんて全然問題ないと思われるので、仕上げはなしの設定。
2009/3/11
今日もメタセコ。
だいぶ、考え方がわかってきた。作る前に工程を考えないといけないのね。Inventorみたいになにも考えないで、相対値を後付けで付加していくやり方に慣れてしまったので切り替えがむずかしい。
ということで、慣れてきたのでロボ子バスト部分を作ってみます。小さいの。
まず立法体。円柱とか作る場合も立法体から入る方が、面が四角になって作りやすいようだ。とにかく面を四角で作っていくのがビギナーには良い様子。
X軸を最初から2分割してますが、これは左右対称にするため。
サーボ部分をカット。
はじめからミラーに設定して左右対称にしたほうが良いようなので、左半分を一旦削除した後に、右側をX軸でミラー設定。
ナイフでカットして形をつくってるとこ。
首とみぞおち部分の凹みを追加。ここ、結構てこずった。面を削除して、内側に面を貼ると、ミラーにしたところが意図しない形になってします。試行錯誤の末解決。どうやら、辺と辺がくっついているように見えても、削除の仕方によっては後で面を貼っても辺どうしがくっついてないところができるらしい。
曲面化したところ。
辺近くにナイフを入れてエッジを立たせます。とりあえず形はこれでよしと。
切削するために、外枠を作りました。別オブジェクトにて。
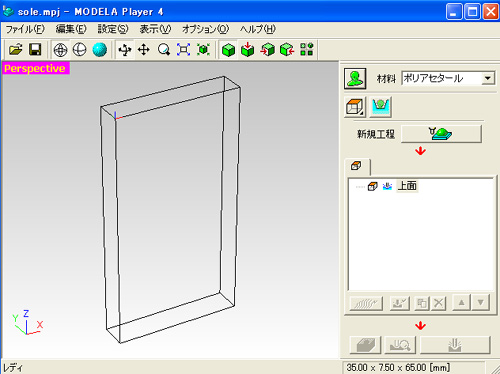
で、モデラプレーヤーで読めました。今度はXYZ軸の修正はなし。設計段階で、モデラプレーヤを考慮した軸で作ったので。(削るのは素材が寝ているが、設計時には上の写真のように素材を立てたような感じ)
枠を入れた外形が30x50x80なのですが、手持ちのスタイロフォームが20mm厚しかななったので、2枚をスチロールボンドで接着しました(これが大失敗)。
で、面だしして、荒削りに入って、スムーズに切削しているとおもったら途中から異音が。そのとき、ちょうど電話中だったのでそのままにしていると、「バキバキバキ」と...
見たら、接着部分まで達した刃が、乾いていない接着剤を巻き込んで、先端の直径が1.2倍ぐらいに...それで熱でかたまっているという悲惨な状態。
 <−ふっとんだ <−ふっとんだ
スチロールボンドって、塗ってからすぐに貼りあわせてはダメなんですねえ。説明書読んだら、塗った後10分乾かしてから貼りあわせるとあった。くそー。
KORKSから厚いスタイロフォーム材がもらえそうなのでとりあえず明日もらいにいこう。その間、とりあえず、手持ちの発砲スチロールでも削ってみるか。
2009/3/7
ひさしぶりに週末に何も割り込みが入らなかったので今日は一日作業ができます。ヨメと息子はコストコに行ったのでしばらくは襲撃もされまい。
息子といえば先日イルカを書いてるときに、子供にイルカを教えたときに「ユリカ」と間違えて発音してたのを思い出した。2〜3才ぐらいだと文字はまだ読めないから音声入力だけでことばを覚えてるんだと思うので正確に発音できないと思う。あと、のどの構造や発音訓練の未熟で発音しづらい音とかあるようだ。たとえば、ウチの場合は「さ」が「た」になってしまう。「あのさー」が「あのたー」になる。このような間違いはかわいいので、サンプリングして子供ロボットとか作るときに有効ではないかとおもってます。保父さんを一年ぐらいやれば結構なサンプリングができるかも。
息子のサンプリング例は次の通り、
イルカ −> ユリカ
ピタゴラスイッチ −> ピタチッチ
UFO −> ユンボー
プロペラ −> ペロプラ
チロルチョコ −> ピロルチョコ
スターウォーズ −> スッタオーレ
ティガー −> ピガー (ティガーはプーさんの友達のトラ)
ラーメン −> ラーミョン
あと、刃物は全部「ほうちょう」。時代劇を見てると「あのほうちょう、なげ(長い)」という感じ。
もうだいぶ育ってしまった(もうすぐ4歳)ので、こういうかわいい間違いはほとんどしなくなった。将来のAI作成の為にもう一人作るか。2〜3才ぐらいが一番おもろい。
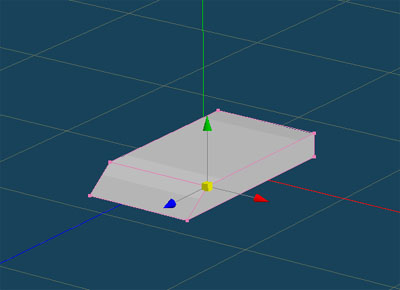
さて、昨日は軽くメタセコを使ってみたんですが、よく調べるとフリー番でもdxf出力できた。ということで削れるかどうかモデラプレーヤーで読み込ませたところ。
(右下の数値に注目)あ、できた。でも座標がなんか違う。違うというかメタセコとモデラプレーヤーの座標表示が違うんですね。
よく見るとX方向はあってるようなので、出力するときにZY軸を入れ替えました(保存するときのパネルでそうゆうのがあった。簡単簡単。)。その後、いろいろやってみてY軸を反転すると良い感じに。
表示する向きはちょっと違うけどこれで意図した座標になりました。まとめると、
<メタセコからモデラプレーヤーにdxfでデータを送る時>
1)ZY軸を入れ替え
2)Y軸を反転
おっし、では早速、ロボ子の外装を作ってみます。いきなりでかいのは無理なので、桜花(別で作ってるちっさいロボ)用のロボ子外装を練習でつくってみようと。設計できたら田中さんのようにスタイロフォームで削ってみて具合を確かめて見ます。そういえば、今おもいだしたが、田中さんから以前メタセコの話を聞いてたような...いや、まちがいなくこれがいいと教えてもらってた記憶がある。忘れてるんだなあ。その時は自分で外装モデリングやるなんで思ってなかったので、脳の揮発性メモリ領域に格納してしまったようだ。(というか忘れやすいのはおまえの性能の問題とよく言われますが。)
...
すでに夜。全然上手く書けない。
どうやら、CGは慣れが必要のようだ。操作を覚えればすぐにできるものではないということが判明。ここはじっくり腰をすえてやるか。
まずは、Webで情報を公開しているページが沢山あるのでその辺から情報収集してみるのと、書籍(ロボットを書くというのもあった)を購入してみます。
あと、プラグインが非常に沢山あって、シェアウェア版でないと使えないらしいので、正規版5000円を申し込むことに。
2009/3/6
今日もCG。
いろいろ調べてみると、shadeはweb上ではあまりよく書かれていない。プロの意見が多いので、価格とかも考えるとどうか?LightWaveはプロのアニメーターも使ってる様子。プロダクトIGとか。これでタチコマ書いてるんだなあ。
モデルを作るのはモデラーで、動かしたり静止画にしたりするのはレンダラーというのがわかってきた。そうか、3DCGソフトで動かしたりできるのね。ということは企業PRとか作ったり?
ということでLightWaveの体験版を使ってみる。
 <-サンプル開いただけです。 <-サンプル開いただけです。
おー、線を描くのはshadeの方が合ってた(illustrator使ってるので)が、操作性はこっちの方がいい感じ。が、価格が高い。悩むなあ。企業PRのアニメーション作れるしなあ。
で、あやうくLightWaveをポチっとやりそうになったところでもう一度冷静になってみる。もうちょっと調査。で、発見したのがフリーソフトのMetasequia(メタセコイヤ?)。経験上、Webに情報が多いフリーソフトって良いものが多いので早速無償版をダウンロード。
これイイ!いままでの2つと違って、何もドキュメント読まずに開始できた。なんと言ってもタダだし!画面がパースメイン(パースだけかも)というのも気に入った。慣れてないので3面図だと立体が掛けなかったが、これならちょっかんですぐに始められました。モデラーだけのようだが、本来の目的はロボットのパーツを作りたいので問題なし。
気になる寸法指定ですが、寸法指定で図形かけるらしい。但し、単位が入ってないので本当にこれで切削データが作れるかなぞ。とりあえず35x65の足裏形状を作ってみる。これが35mmx65mmなのか35ドットx65ドットなのか35mx65mなのか。。。基本的にフリーだが、シェアウェアで購入するとDXF出力ができるらしいので、シェアウェア版を購入してみよう。たったの5千円。そしてモデラ(PLAYER)で読んでみれば単位がなんなのかわかるハズ。
2009/3/5
今日もヒマなときにちょっといじってみる。
イルカ?
ポリゴンと自由曲面の違いがなんとなくわかってきた。
Inventorは拘束を使って形を作るが、こちらは変形で形を作る感じのようだ。寸法などがはっきり決まってるモノはInventorの方が設計しやすいかも。あと、干渉解析ができない。ただし、形が決まってない外装なんかはやっぱりCGソフトの方がやりやすそうですね。
で、Basic版が安い(1万円)ので買おうと思ったが、どうやらネット情報を見ているとモデラー(形状を作る部分のソフト)はLightWaveがいいとのこと。でも値段高いなあ。10万か。悩む。
2009/3/4
バイオメガ終了〜。(涙) 思えば、バイオメガを読むためだけにウルトラジャンプを買ってたなあ。次回作はなんと宇宙で巨大ロボット系という話。ブラム学園に掲載されてたようなヤツかなあ。
それはさておき、週末になるといろいろと割り込みが入って作業できてなかったんですが、本日は仕事の谷間が生じたために少しロボ子作業を。雨だし。
出張中だった足が帰ってきましたが、こちらのより、KORKSの方が完成度が高いのでイマイチフレームを触る気になれず。ということで外装の方を進めてみます。
仕事ではInventor使ってるんですが、どうやら調べたら3DCGソフトでDXFとか出力できるらしい。DXF出力できたらモデラとかでけずれますね。造形能力無くてもモノが作れる!shade10でKHRのモデリングしているひとをWebで発見したりしたので、shadeの導入を検討してみます。
ということで、shade10のお試し版(30日間使えるらしい)があったのでポチっと。
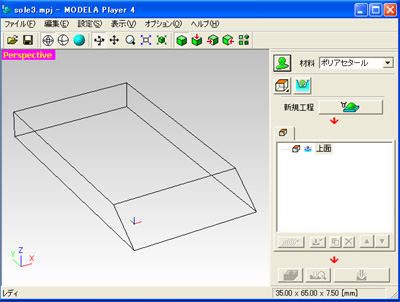
半日チュートリアルをやったところ、テーブルらしきものが書けました。テーブル台の中心がズレてますけど。
CADと違ってCGソフトって安いですねえ。1/20かあ。
ということで本日はもうちょっといじってみますが、なんか使えそうです。
2009/2/14
本日、お台場でフジテレビのイベント「めざましテレビ元気のミナとも」にて関東ロボット連合(主にKORKS)製ロボ子足のフィールドテストが実施されております。1mぐらいのめざまし君が歩いていたら、その足はロボ子足です。休日にお台場に行かれる方は探してみてください。京商殿のご好意で、マノイのブース(近く)にいると思われます。
この足ですが、私の方で実験していたのとは違い、KORKSでもっとハイパワーサーボ、かつ剛性の高いフレームで作っていたロボ子足が採用されています。最終的にはこちらのフレームが使われると思いますが、浅草ギ研で作っているのは主にセンサー系などのテスト用に仮に作っているものです。本番用はサーボなどが高価なので何体も作れないのです。
金曜日から調整されていたのですが、なにぶんフィールドテストなので壊れたりします。もし動いていない場合はすいません。現地ではテンパっているウッチーの姿が目撃されるかもしれません。
ギ研の方の足ですが、KORKS製と比べた結果、フレームガタが大きいことがわかりました。特に取り付け方で改善される部分が多いと指摘されたので、イベントが終わったらとりあえずその辺りの補強から行ってみたいと思います。
本日は、ギ研足も予備として待機しているので、ロボ子作業はなし。別なロボットでもいじってみようと思います。
1/26
仕事が急にキャンセルになったので、ここ2日ほどメイドロボやってました。主に今まで作っていた板金パーツを使い、その他はL字ステーでトラス構造にしてます。結構時間かかったー。
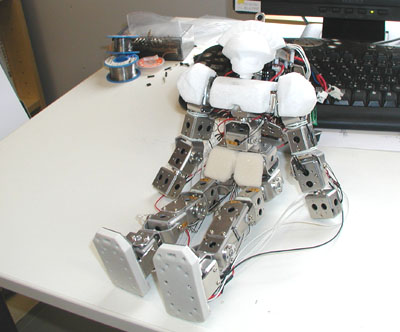
で、下半身まで仮り組みして動作テストしたところが下の写真です。システムはシロイノと同じものを使ってます。BluetoothでPCから指示するリモートブレイン方式ですが、下の写真では電源だけケーブルで取ってます。

片足で立てました。横の机が70cmの高さです。
ということで、上半身を付けていない現状ですと4000番サーボで歩行可能ではないかという結論になりましたのでこのまま続行します。フレームの剛性はまあまあですが、足が長いので少しゆがんだだけでも大きく変化します。歩行モーションをいろいろ検討しましたが普通の小型ロボと同じような考えでの歩行モーション作成は難しいことが判明したので、歩行にかんしてはじっくりと詰めていこうと思います。
足が長いので、少しのズレでも増幅されます。この辺りをどうするかがポイントかと。単なるモーションでは毎回違う動きになります。
ここ最近、関東練習会やわんだほーに出場していろいろな方の話を聞きましたが、
・大きいロボの場合、下半身だけで歩行しても上半身を付けると歩かなくなることが多い
・リンク機構が流行ってる。剛性も高くできる。(構造によってはトルクUP)
・ダブルサーボは効果ある。
・コストを考えなければ、トルクは大きいほど良い
という話を聞きました。このあたりの情報も生かしつつ進めます。
そういえば、わんだほーは40台中30位でした。どうせ勝てないので徒競走の時にコマネチやってたりで遊んでましたが、団体戦(キューブ)で私以外の方の奮闘で勝ってしまったので微妙に順位が上がってます。しかし、見てるだけよりも出場するとかなり面白いですね。次回もエントリーしようと思いました。
2009
1/9
今年もすでに一週間経ってしまいました。あけましておめでとうございます。本年もよろしくお願いします。
さて、ロボットの方ですが、1/11に開催されるわんだほーにエントリーしたこともあり、先にエレキ系の検証を行うことにしました。メイドロボ試作はとりあえずリモートブレインの形態にする予定でしたので、手元にあったマノイPFを使ってエレキ系だけ構築してみます。メイドロボに搭載するのもほぼ同じ構成になるかと思います。ロボット名は「シロイノ」にしました。
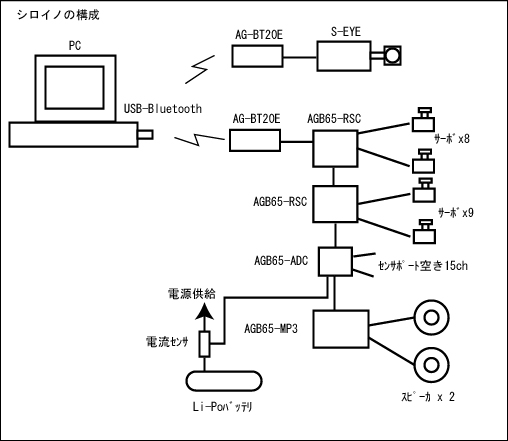
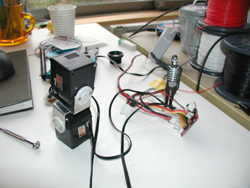
実装した様子はこのようになりました。マノイPFは内部に結構余裕があるので、いろいろ詰め込んでもOK。とりあえずセンサーボードを積んでいますが、いまのところは電流センサしか入れてません。あとで距離センサや近接センサなどを増設できますが、今回は確認だけなので、他のセンサは搭載しないと思います。本番のメイドロボではセンサーボードも増設してセンサ類を沢山つける予定。
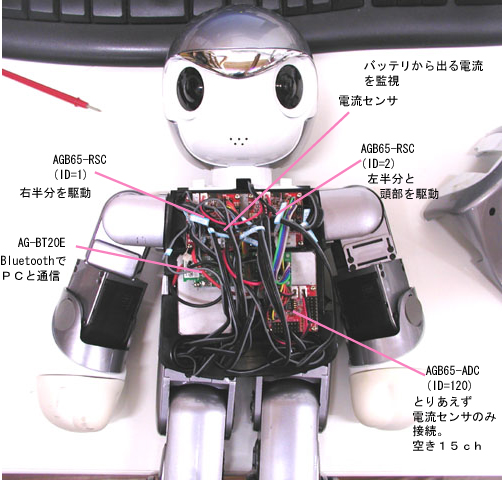
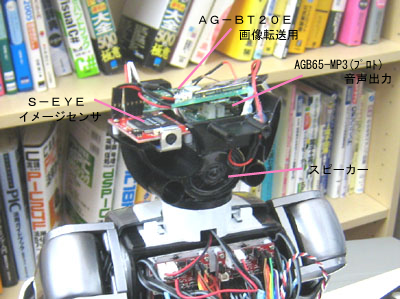
頭部の様子です。右目だけにS−EYEがついています。S−EYEは本来はセンサなのですが、今回はカメラのような使い方をしています。AGB65-MP3というのは開発中の音声再生ボードで、MP3ファイルを再生できます。今のところ、予定では50音を搭載した状態で出荷する予定で、すぐにテキストトークができます。声は声優さんのものを録音済み。(出荷時に添付するかはまだ不定です。)
ロボット側は単に浅草ギ研のロボット神経システムを接続するだけで終了です。プログラムは全てPC側になります。
PC側は他の製作例と同じく、マイクロソフトのフリーの開発環境、VisualC#2008を使いました。プログラム詳細については後ほど、サンプルプログラムページの方に詳細をアップする予定ですので、手持ちのロボットをリモートブレイン化したい方はそちらを参照いただければ、実現可能と思います。PCアプリの方は、単純にシリアル通信によりAGB65シリーズに対してコマンドを発行しているだけで、非常に簡単にプログラムできます。
ということで、PC側アプリを作って、動作テストしたのが下の映像です。画像をクリックすると映像が出ます
 (WMVファイル、1MB) (WMVファイル、1MB)
映像では、PCに打ち込んだローマ字をコマンドに変換してBluetoothで送り、発声させています。テキストスピーチですね。その後、セットしておいたモーションをボタンクリック一発で再生させてます(コマネチ)。
モニタの方はこのような感じです。(下の画像をクリックで映像再生)
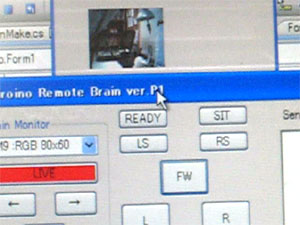 (WMVファイル、600kB) (WMVファイル、600kB)
S-EYEはセンサなので本来はこのようなモニタ的な使い方を想定していませんが、Bluetooth経由でモニタ風に使っています。実際には静止画を何枚も送って再生しています。これは歩いているところの映像です。歩いている最中は歩行制御系に無線の帯域を取られて、映像は転送できていませんが、止まっているときにはパラパラマンガ風に再生されています。これは80x60の画素で非圧縮データです。非圧縮なのでPC側の計算が非常に簡単にできます。40x30にするとビデオ風にスムーズに動画再生されます。
S-EYE本来のセンサ用途としては、まずは低い画素で動く位置を検出し、その後、その部分だけ拡大して演算する、というものを想定しています。よって、ある一部分だけを転送もできます。
と、こんな感じでわんだほーに出場してみます。現在のところ、歩行しかできませんのでわんだほーの各種競技に対応したモーションを作成する必要があります。あと2日。
わんだほーの情報は、主催のいしかわさんのページにも掲載されています。後ほど結果をレポートしますが、時間がある方は見学OKですので見に来てください。今回は川崎で開催します。
12/23
メリークリスマスイブイブ!

チキンじゃないです、ターキー(七面鳥)です。でっけ。焼くのに4時間かかりました。モンハンの肉!「上手に焼けました〜」w
最近は週末は結婚式や忘年会などのイベントで作業できませんでした。そういえば、今週末12/27は関東ロボット練習会及び忘年会ですねえ。楽しみ〜。
趣味を仕事にしている危険性(ロボット作りが好きでなくなっていく)を感じて、このページも含めてなるべく趣味ロボをやっていこうと思っていましたが、今年は(も?)関東ロボット練習会にはまったく参加できませんでした。最近落ち着いてきたので、これからは時間を作って趣味ロボを充実させたいなあ。また変なことがおこりませんように...
さて、続きですが、前回、ロボトマで切削したパーツが非常によかったので、今回もこちらで切削しました。自作板金はちょっとしたステーぐらいでしたら問題ないのですが、今回の足裏のように精度が要求されたり、パーツが大きかったりする場合にはやはり切削機でカットするのが良いです。
ロボトマですと価格も安いし、板厚も1.5mm以上も可能ですので、手板金では無理なパーツなども作れます。
私の場合、アルミ板をカットするのにPCBカッターを使ってますが、A5052の1.5mmだと実はスペックオーバーになります。実際に切るときは無理やり押し込んで切ってる状態で、10cmぐらい切るとモータが熱くなってきれなくなりますので休みながらカットしてます。また、ボール盤も6mm以上の径になると正確な穴あけがほぼ不可能です。ということで今後は板厚1.5mm以上、もしくは穴径が6mm以上ある場合はロボトマで加工しようかなと思ってます。
CADデータを2DのDXFで用意できれば、事前にデータを送っておいて、完成後にとりに行くこともできます。
robotomaアルミ板加工サービスのページ
学生で、正確なフレームを自作しようとした場合、プロ並みの精度で加工する場合は
1)Inventorの学生版を入手(確か2万円はしなかったような。本物は80万円ぐらい。機能は同じ。)
2)シートメタルで設計
3)DXFに変換、robotomaにメールで送る
4)完成後、取りに行って、robotomaにおいてある曲げ機で曲げる
5)帰ってからタップを切る
というパターンで実現可能だと思います。
ということで、足裏パーツの切削ができました。

ケガキ線にそって曲げたところ。

今回は、近所のインタラプトが入って作業はこれまで。次の土曜日は関東練習会&忘年会なのでその様子でもお伝えします。
11/29晴れ。

お、なんか船がいっぱい出てるな。なんか来てるのか?釣りしてぇ。
さて、本格的に設計に入るとします。近藤サーボは情報が少ないなあ、と思ってたらKHRのページに寸法やらがあるんですね。全然わからなかった。サーボの方に興味があるのでキットのページはいままで見ませんでした。サーボのページにもココへのリンク貼って欲しいですね。
で、寸法ページを発見したのでInventorでモデリング。
KHRシリーズの各種データのページ
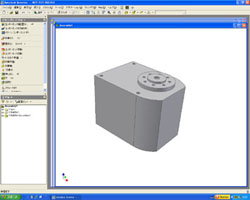 
寸法わかってると速い。全然速い。今まではデジタルノギスで複数個を測定して平均とったりとかいろいろ...いままでの苦労はなんだったんだ。写真左は4000番台サーボのサンプリングしたとこです。5分でできました。
写真右はブラケットデータを作り直したところです。
と、実はこの作業は先週終了間際に行ってました。で、これを自作するのも精度でないのでどうしようかとおもってたら会長から「弟子にやらせますよ。加工屋と同程度の精度でまっせ。」とのお言葉。
ということで秋葉原にある通称ロボット虎の穴で修行中の内村ことウッチー がメンドクセ板金をやってくれました。 がメンドクセ板金をやってくれました。
到着。

おー、いいー。上のデータを加工できるように修正してロボトマで加工機(有料で加工してくれる)を使って切削し、曲げたようです。しかし、ロボトマのページをひさびさに見ましたが、「PRS-DE07MSが3個買うと1個付いてくる!」というのはスゴいですね。ムチャします。PRSシリーズは発売直後にこうゆうサービスがあるので良いですね。ここの加工機は結構性能いいです。上ので切り出しに2時間ぐらいだったらしい。速い。アルミだぜ?ウチのMDX-20だったら一晩かかって半分というところか。というかMDX持ってるんだったら使えよ!と言われそうですが。
さっそくサーボにハメてみましたがぴったし。曲げも正確。自分ではできねぇ。ちなみに、会長に「曲げは何をつかったんですか?」と聞いたら「赤いヤツ」とのこと。全然わからねぇ。
さて、前回は発砲スチロールでダメだったのでとりあえず発砲スチロール部分をアルミに置き換えるのですが、ロボットがデカいのでなるべく軽量化しないといけません。で、足首〜ヒザのようなサーボ間が長い距離のところはL字アルミステーを使ってスカスカにしようと考えました。トラス構造にすれば剛性も問題ないと思われます。

近くのDIY店(カインズホーム大原店)に行ってきました。L字やU字のステーが沢山ありました。t=0.8〜2ぐらいなのでちょうどいいです。今までは秋葉のラジデパとかでアルミ素材を入手していましたが、「なんで長さが910とか半端なんだ?」と疑問でした。これってようするに建材なんですね。910mm=3尺なんですね。事務所の柱の間隔も910の倍数でした。上のステーはサッシ系の材料売り場に置いてありました。
では設計再開です。
とりあえず、足首から下できたー。足裏の丸穴は感圧センサー用です。側面の凹は近接センサー用です。近接センサーはけっこういっぱいつけようと思ってまして、つま先に前と下方向に各1個、かかと前下に各1個、外側側面に一個の5個です。感圧センサも片足裏に6個つける予定です。
つま先とかかとを分離してます。これは「せのび」できるようにするのが主の目的で、歩行時も役立てばなお良いかと。でもつま先のサーボは全体重がかかるので、おそらく駆動できないような気がします。もくしは別足に体重をかけてこちらを伸ばし...という感じか?やってみないとわかりません。
さっそく板金に?と思ったらアルミ板切れだった...ということで本日はここまで。
11/22晴れ。

冬は空気が透明になると言いますが、東金(約40km先)の建物まで見えます。
今週もいろいろありました。基本的には子供がカゼひいたのが痛かった。寝るヒマねぇ(仕事二人分)。小さい子の間ではすでに一回目のピークがきているようなので、小さい子をお持ちの方はお気をつけて。元気があればなんでもできるっ(byイノキ)。
さて、前回のつづきで発砲フレームにサーボ取り付けを続けます。
 
(写真左)3時間ぐらいで発砲切り出し&ホットボンドで仮止め終了。
(写真右)ホットボンドが固まったので、おもむろに持ち上げようとしたら、やはり接着部分がボキッっと折れました。そうくると思った。
 
ということで、RSCでサーボを駆動(PCから有線で指示)しつつ、立たせた状態でホットボンドをつけることにしました。写真右が立たせた状態です。机の高さが70cmなので大きさが大体わかると思います。感覚的には見た目は子供(小学生低学年?)の感じですね。メイドとしてはもうちょっと大きい方が良いかもしれませんが、大きくなると難易度上がるのでとりあえずこのままで。
ここで、本題の「このサーボで駆動できるのか?」の実験です。

間接をいろいろと動かしてみましたが、上の写真のような感じで斜めになっても足首サーボが動くので、とりあえず静歩行程度でしたらもんだいなくできそうです。ROBO-ONEでないので足裏を明確に床から上げて歩行しなくてもよいですからね。ちなみに、私の歩行も、靴のかかとが磨り減るところを見ると床面から完全に足を浮かせて歩行しているのではないので、床から足裏が浮く、というのは個人的にはどうでもよいことではないかと思ってます。それよりも、センサー多用して外乱に強い歩行にするのが実用的ではないかと。何に実用するか?という話もありますが。やっぱメイド喫茶で働くですかねぇ?
起き上がりとかはとりあえず考えない方向で。サーボや構造はだんだん変えていく感じでいきますので、難しい動きは追々やっていくという方向性。
以上で「フレームが軽ければ4014でも動くんじゃね?」という結果が出ましたので次週から本格的にフレーム及び外装の製作に入ろうかと思います。サーボの確認だけで3日かかりましたね。ロボットは時間かかるなあ、と改めて感じた瞬間でした。

最後にトンビ座りさせてみました。いやー、萌え軸いいですねぇ。中村博士はやっぱ天才だ。(腕はヨウジ刺してます)
さて、ヨメと交代して子供の看病せねば。(今日の作業は絶対に遊んでるように見えるよなあ。実際そうなんですけど。)
2008.11.22
今日の九十九里はくもり。

ガラスに貼ってるのはイーモバイルのアンテナです。ここは、ブロードバンド系の有線が来てないんです。最高でISDN64。どこの先進国だよここは...
ちなみに、都内ならぜんぜん問題ないと思いますが、この辺りだと天候により通信速度が変わります。auとイーモバイル試してますが、auは天候が悪くても良くてもコンスタントに遅い(が、切れない)感じで、イーモバイルは天候が良いとニコ動とかが止まらずに再生するぐらい速くなりますが天候不順、特に強風のときは全然だめ。昨日は強風&雨でパーツを20点ぐらい発注するのに2時間かかりました...
さて本題です。先週はWebにアップした後、簡単に直交の板金パーツを作っていました。
仮組みしたところ。上の写真(左)は、AGB65−RSCでとりあえずサーボを動かして、干渉などをチェックしているところ。ショッカーの前にあるのがRSCです。電圧変換オプションを経由してPCについないでます。PCのソフトはRSCのページで紹介している簡易操作プログラム。
その後、写真右のように足裏部分とスネ部分をスチロールカッターで凹型にカットして、ホットボンドで仮止めしてみました。この状態なら全然重くないので問題なく動作できます(あたりまえか)。
今日の作業の中心は板金なので、ひさしぶりに板金の様子をお伝えします。ROBO−ONE第4回大会の時と基本的にはやりかたは変わりません。
仮組みが問題なさそうだったので、複製を作ります。展開図(Inventorだと”フラットパターン”)を印刷し、アルミ板に貼り付けます。アルミ板はA5052です。t=1.5mm。

次にセンタポンチ。写真はオプティカルセンタポンチ。筒の中にレンズを入れてのぞくと十字が見えるのでそれに中心を合わせ、レンズを外してポンチを差し込んで打つというもので、かなり正確に中心にポンチが打てます。
でも、数が多いと結構面倒なので、私はサーボホーン取り付け穴のように穴間ピッチがズレると致命的になるような部分だけオプティカルセンタポンチを使ってます。その他は普通のポンチでやってます。
そういえば、今はオプティカルセンタポンチを売ってるところ無いなあ。 キットが流行してますからね。
 
(写真左)次に穴あけと切断。ボール盤を3個持ってますが、小さいのは小さい穴あけ用、大きいのは大きい穴あけ用です。私はこの手の道具はラジデパ1F表側の道具屋で買うのですが、そこのお兄さんが穴サイズでボール盤は変えたほうが良いと言っていたのでそうしてます。実際に、小さいボール盤でノスドリルなんかを使って大きな穴を開けようとするとかなりブレます。写真左では小さいボール盤が2つ写っていますが、写真手前のプロクソン製のはかなりイマイチ(ブレる。垂直に降りない。操作しずらい)。奥のは無名メーカーのHDP−10というやつで、これは非常に良いです。しかも安い。ラジデパで1.6万円でした。たしか。ちなみに、ラジデパの奥にも道具屋ありますが、間違ってもそっちで買ってはいけません。なぜなら?行けばわかります。1F手前(半分外)の方は聞くといろいろと教えてくれますのでビギナーにもお勧め。
(写真右)穴あけ終了状態。板の上に写っているボトルは切削オイルです。
 
(写真左)カット終了。カットはホーザンのPCBカッターの歯をアルミ用にして切断してます。このときも定期的に切削オイルを供給しながらやってます。オイルささないと、切れ味が低下して摩擦が増え、熱くなりモータが熱ダレして回転が遅くなってきます。
(写真右)カット後は曲げです。曲げはホーザンの曲げ機を使っています。手曲げなので角度は正確に90度になりません。 ということで若干鋭角に曲げて、後で広げて修正してます。ヤゲン曲げ機欲しいなあ。
 
(写真左)曲げ終了。
(写真右)水につけて紙をはがします。

待っている間に、ひざ部分にもサーボを入れてみました。イスと同じ高さ。ということは私のひざ下とほとんど同じ長さということか?やはり、マンガ絵は足長いですねえ。

しばらくすると紙がはがれるので、拭いて、ヤスリでバリを取ったら完成です。
朝10時半から初めて、ここまでで午後1時。途中で30分ほど畑仕事したので正味2時間というところでしょうか。
午後からは客人が来るのでとりあえず、今日はここまで。
2008.11.15
次の日です。基本的には日曜日は子供と遊ぶ日に決めてますが、今日は雨モードでおとなしく、一人でTVを見てるのでそのスキにちょっと作業を。
しかし、一人でおとなしくTVを見る、なんて成長したものだ。3ヶ月前まではくっついて離れなかったのですが。

前回、ブラケット完成と思ったのですがネジを切るのを忘れてました。前に書きましたが、インパクトドライバーに無理やりM2タップを取り付けています。上がその写真。インパクトドライバーにチャックをつけて、その先に普通のM2タップをつけてます。充電ドライバーも持ってますが、このようなチャックを取り付けられるものではなかった。充電ドライバーもインパクトドライバーも価格はそんなにかわらないので絶対にインパクトドライバーの方がいいと思います。パワーも10倍ぐらい違う。M2タップを切るぐらいならインパクト機能が働くまで負荷がかからないので普通の充電ドライバーのように使えます。少し難点なのは重いところでしょうか。
事務所建築の時に一部始終を見ていたのですが、最近の大工はクギ&トンカチはほとんど使わないようです。インパクトドライバーとビスでほとんどの作業を行ってました。また、材料もプレカットといって工場であらかじめ機械でカットして、現場では組み立てるという感じが主流らしいです。大工さん曰く、最近の若い大工はこんな感じなのでイレギュラケースに対応できないようです。たとえば、この大工さんは上棟(骨組みを組み立てる日)の前の日に構造材を何本か盗まれたらしいのですが、朝気づいて夕方の上棟終了までには現場でカットして間に合わせたらしいです。昔の大工ならあたりまえにできることですが若い大工なら無理だろうと言ってました。寸法もメトリック法でなくて尺貫法です。サシガネだけでほとんどの寸法を書けるらしいです。直角を書くやり方を教わりましたがなるほどなあと。(今は忘れました。確か、サシガネに書いてある寸法3つの長さの三角を書くと一個が直角になる、という感じ)
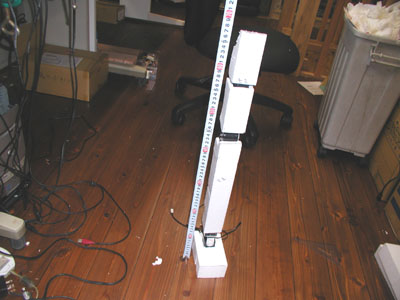
ということで、もう少し組んでみました。 股関節まで。ヨー軸は当然モモ部に。モモ部が途中で切れてるところがヨー軸です。
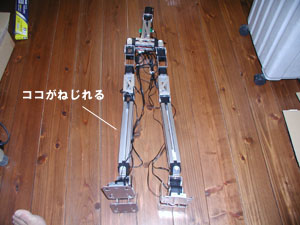
発砲スチロールの強度、というよりもホットボンドでサーボと発行スチロールを固定した部分の強度に問題ありそうです。あと、その部分がかなりしなりますので、制御難しそう。ここまでで、計算通り66cm。(メジャーの赤丸が10cm単位)
今週はこれまで。
2008.11.16
いきなり、一週休んでしまいました。先週はひじょーーーーーーーーーーーーーーーにつらいことがありました。サブプライム問題とか(まだ)対岸の火事だと思っていましたがまさに直撃。本当、銀行って世の役にたってるのか?銀行氏ね!生保も金払わないし、年金も出ないし。世の中「修行」が多すぎます。ちなみにギ研では税金や、赤字仕事を「修行」と言ってます。(東北人は我慢を美徳とするのだ)
ということで余計な仕事が増えて、乗り切った(というか損失額はかわりませんが)とたんにダウン。現在は復活。昨日から酒も飲めるようになった。よかった。TVでやってる景気対策の特例を使ったりとかなんだかんだ言って、日本の政治はわるくない(というか良い)とおもう。しかし、最近は世の中の動向に直結しすぎだぜ!せっかく俗世を離れてこもってるというのに...
さて、本題ですが、大きく方向性が変わりました。3週目で。すいません。とりあえずリモートブレインはそのままで、小型機より先に大型機を作ることに。しかもROBO−ONE用ではないものです...
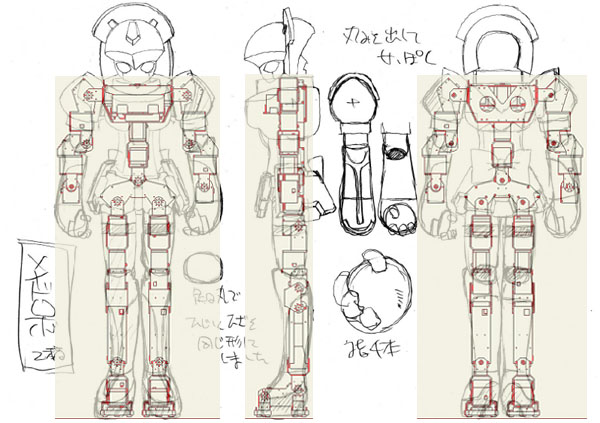
関東ロボット連合のマスコットキャラ、「ろぼ子」です。

でじキャラっとみたいな名称ですねえ(私が付けたのではない)。語尾に「にゅ」とか言うんでしょうか?見た目はファイヤボール系です。120cm。で、私が外装のプロトをやることにしました。作るにあたり仕事メータが趣味に振れてましたので土曜日にやるとに。
ということで題名も変わりました。「メイドロボットの作成」に。直球。
形だけでなく、実用的なものにできたら面白いなあ、と考えてますが、時間かかりそう。とりあえずハリボテ程度の簡易外装を作りそれを動かすとこまでやる予定です。外装はそのまま本番で作るときに使えれば、と。今回は浅草ギ研製品で簡単にリモートブレインでテストする予定ですが、本番は会長が作っているインテル入ってる〜の速ーいボードが入ると思われます。ロボジャパンでひっそりと展示されてたヤツですね。
まず、イラスト画像をイラストレータに貼り付けて、120mm高で描画した箱に合わせて縮小し、主要部分に線を引きました。それをプリントして定規で測って実寸出し。
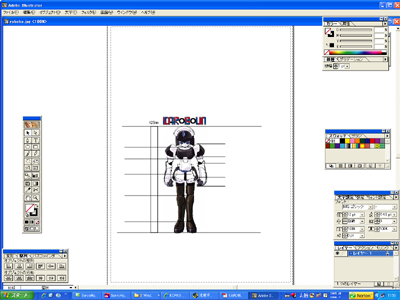
趣味なんで、購入ではなく手持ちのあまってるサーボを使いたいところ。以前の仕事で使ったKRS4014HVが12個あったのでそれで足を作ることにしました。
しかし、120cmなんて作ったことないので、RCサーボとかで駆動できるのかどうかわかりません。ということでとりあえず、発泡スチロールで仮組みして、サーボで駆動できるかどうか実験してみることにしました。
近所のカインズホームで発砲ボードとスタイロフォームを購入。材料売り場よりも建築資材売り場の方がぜんぜん安いです。厚みありませんが。近所(といっても数十キロ)にはカインズが2つあり、大原店の方が近いのですが茂原店の方が巨大で品数も豊富。

あ、ちなみに、事務所(新)からは海見えます。床とか壁とか自分で塗りました。ふふふ。
スチロールカッターと、発砲スチロール専用ナイフも購入。左3千円、右1千円でした。

スチロールカッターは電池式でした...使えないので、電源コードを切って手持ちの電源(DM330−MW、皆さん使ってるヤツですね)につなぎました。電池は単ニが6本=9Vのようですが、5Vぐらいの電圧でもぜんぜんOKで切れます。サクーっと。楽しい。

発砲スチロールに寸法取りした値で書き込んで、
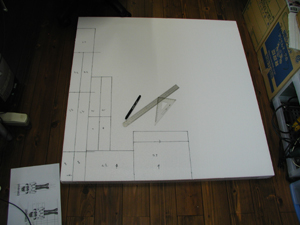
カットしました。おー、でけー。
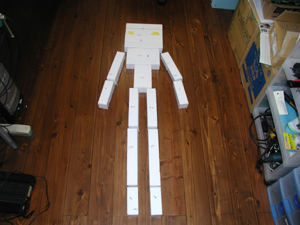
4014で動くかなあ?
この後、足首のブラケットまで作って作業は終了しました。ストーブが届いたので煙突を設置せねば...
2008.11.8
はじめに
関東ロボット連合で何か作ってみるか?ということになりました。
|