2009/2/13
メイドロボのページと桜花IIのページを分離しました。ついでにロボット名をMIGに変更。作っているうちにツインテールになってしまったのでミク風にしたりしなかったりする予定です。
2009
1/9
今年もすでに一週間経ってしまいました。あけましておめでとうございます。本年もよろしくお願いします。
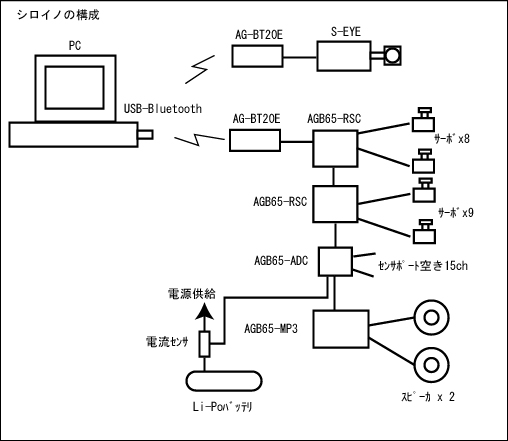
さて、ロボットの方ですが、1/11に開催されるわんだほーにエントリーしたこともあり、先にエレキ系の検証を行うことにしました。メイドロボ試作はとりあえずリモートブレインの形態にする予定でしたので、手元にあったマノイPFを使ってエレキ系だけ構築してみます。メイドロボに搭載するのもほぼ同じ構成になるかと思います。ロボット名は「シロイノ」にしました。
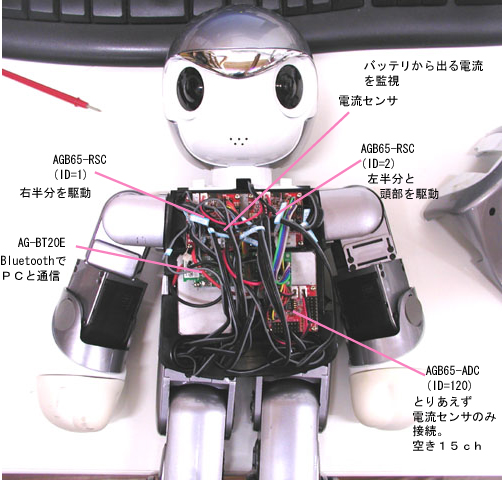
実装した様子はこのようになりました。マノイPFは内部に結構余裕があるので、いろいろ詰め込んでもOK。とりあえずセンサーボードを積んでいますが、いまのところは電流センサしか入れてません。あとで距離センサや近接センサなどを増設できますが、今回は確認だけなので、他のセンサは搭載しないと思います。本番のメイドロボではセンサーボードも増設してセンサ類を沢山つける予定。
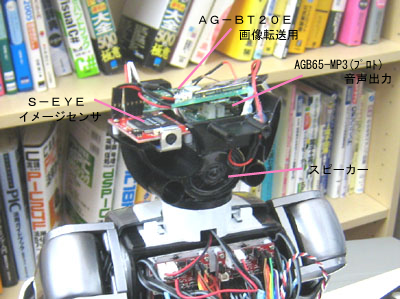
頭部の様子です。右目だけにS−EYEがついています。S−EYEは本来はセンサなのですが、今回はカメラのような使い方をしています。AGB65-MP3というのは開発中の音声再生ボードで、MP3ファイルを再生できます。今のところ、予定では50音を搭載した状態で出荷する予定で、すぐにテキストトークができます。声は声優さんのものを録音済み。(出荷時に添付するかはまだ不定です。)
ロボット側は単に浅草ギ研のロボット神経システムを接続するだけで終了です。プログラムは全てPC側になります。
PC側は他の製作例と同じく、マイクロソフトのフリーの開発環境、VisualC#2008を使いました。プログラム詳細については後ほど、サンプルプログラムページの方に詳細をアップする予定ですので、手持ちのロボットをリモートブレイン化したい方はそちらを参照いただければ、実現可能と思います。PCアプリの方は、単純にシリアル通信によりAGB65シリーズに対してコマンドを発行しているだけで、非常に簡単にプログラムできます。
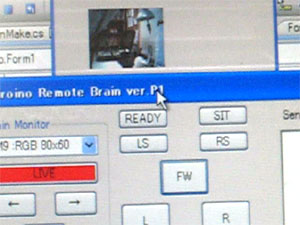
ということで、PC側アプリを作って、動作テストしたのが下の映像です。画像をクリックすると映像が出ます
 (WMVファイル、1MB) (WMVファイル、1MB)
映像では、PCに打ち込んだローマ字をコマンドに変換してBluetoothで送り、発声させています。テキストスピーチですね。その後、セットしておいたモーションをボタンクリック一発で再生させてます(コマネチ)。
モニタの方はこのような感じです。(下の画像をクリックで映像再生)
 (WMVファイル、600kB) (WMVファイル、600kB)
S-EYEはセンサなので本来はこのようなモニタ的な使い方を想定していませんが、Bluetooth経由でモニタ風に使っています。実際には静止画を何枚も送って再生しています。これは歩いているところの映像です。歩いている最中は歩行制御系に無線の帯域を取られて、映像は転送できていませんが、止まっているときにはパラパラマンガ風に再生されています。これは80x60の画素で非圧縮データです。非圧縮なのでPC側の計算が非常に簡単にできます。40x30にするとビデオ風にスムーズに動画再生されます。
S-EYE本来のセンサ用途としては、まずは低い画素で動く位置を検出し、その後、その部分だけ拡大して演算する、というものを想定しています。よって、ある一部分だけを転送もできます。
と、こんな感じでわんだほーに出場してみます。現在のところ、歩行しかできませんのでわんだほーの各種競技に対応したモーションを作成する必要があります。あと2日。
わんだほーの情報は、主催のいしかわさんのページにも掲載されています。後ほど結果をレポートしますが、時間がある方は見学OKですので見に来てください。今回は川崎で開催します。
ROBO-ONEルール改正
ROBO−ONEのルールが改正になって、出場できなくなりましたので、単なるエンターテイメントロボの方向に。
はじめに
最近、自分の趣味ロボ作ってないなあ、と思っていたら、前回ROBO-ONEに出場したのは第5回大会でした。中10回、つまり5年ぐらいやってない計算。そろそろ、ビルダーであることを忘れ去られそうなのでここらでひとつ趣味ロボでも作ってみます。ついでに、その様子をブログ形式で記録してみます。
最近はロボットコンテストも増えてきて、いろいろと面白い大会があります。知能ロボコンやつくばチャレンジなど、昔ではほとんどなかった自立系の大会も増えてきてます。その中でROBO-ONEは自立系は少ないなあ、という印象なので自立系で作ってみようと思います。
自立系というと、プロセッサ搭載の速いボードで...という手もありますが、最近のギ研はリモートブレインづいてますのでリモートブレインで行きたいところ。で、問題になりそうなのが予選では無線を使ってはダメ、という部分です。そこでレギュレーションをよーく読んでみると、
あれ?軽量級認定大会??なんじゃそりゃ。予選やらないんですね。つまんねー。認定大会で、かぁ。ビミョー。
ということでいきなりトーンダウンしましたが、逆に予選が無いということでリモートブレインだろうがなんだろうが関係ないと。とりあえず、軽量でなにか作ってみます。
ちょうど、テスト用に組んでいた機体があったので、バラして再設計しました。前回と同様、名称は桜花(II)。桜花−>オウカ−>Walker。
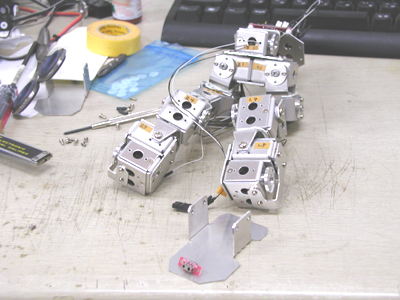
本日は足首まで組み立てました。サーボはギ研製のRS25Dです。結構小さいです。ヨー軸はふとももにして「萌え軸」にしてます。四角い箱はRS25Dの筐体。ネジ穴が沢山開いてるので、自作板金パーツも取り付けやすいし設計もしやすいです。
自作板金はいつものように
1)Inventorで設計、フラットパターンにして原寸で印刷
2)アルミ板1.5tにのりで貼る
3)HOZANのPCBカッターの歯をアルミ用に換えたヤツで切断
4)オプティカルセンタポンチでポンチ
5)ボール盤で穴あけ、ネジタップ切り
6)曲げ。(HOZANの曲げ機が引越しでロスト。万力と角材で曲げた。)
という段取りでやってます。
最近はネジはM2ばっかり使ってるんですけど、M2タップは電動ドリルに付くものが無いので従来は手で回してました。で、引っ越して千葉に来たわけですが、事務所兼家なんで、いろいろと大工道具が増えたわけです(内装自分でやりました。)。その中で、インパクトドライバー用のアタッチメントが多いことがわかり、M2タップを無理やり取り付けることができました。ということで今ではドリルでサクサクとネジ穴があけられています。この辺り(外房)は漁師や農家ばっかりなのでDIYの店が充実してますのでいろいろと買えます。案外、東京よりも部材は手に入りやすいかも。
リモートブレインなので、センサー多目でいこうと思ってます。とりあえず、足裏に近接センサー3〜4個ぐらい搭載予定。上の写真のつま先にのってる赤いヤツです。足裏が結構重要なんじゃないか、と。で、足裏にセンサー沢山積んだら不正地でも歩行できるようにならないかなあと考えてます。可能であれば3軸加速度センサー(LPFつけて)も足のどこかに積んで、効能を試したい。
今日はここまで。できれば、週イチぐらいでアップできればいいなあ。
2008.10.24
|