�͂��߂�
�@���̃y�[�W�ł́A�r�M�i�[�����ɁA�}�C�R���{�[�h�o�h�b�������̊J�����@��������܂��B�J�����̗p�ӂ△���̂b�R���p�C���̃C���X�g�[���ɂ��Ă��������A�v���W�F�N�g�^�v���O�����쐬�ɂ��Ă����������Q�Ɗ肢�܂��BLED�̓_���ɂ��Ă����������Q�Ɗ肢�܂��B
�@
�@���ȉ��̏���2010�N7�����݂̂��̂ł��B�����ӂ��������B
�@�o�h�b�������ɂ��Ă͂��������Q�Ɗ肢�܂��B
�p�[�c���X�g
| �p�[�c |
�^�� |
�w���� |
| �k�d�c |
�m�r�o�v�|�T�O�O�b�r |
�}���c�̒ʔ� |
| ��R�P |
47�`51�� 1/4�`1/10W�̂��� |
�d�q���i�X |
| �P�[�u�� |
�Z���T�[�P�[�u�� |
�M���y�є̔��X |
�^�C�}�ɂ���
�@�}�C�R���ɂ̓^�C�}�Ƃ����@�\������܂��B����̓N���b�N���J�E���g���Ď��ԂȂǂ𑪒肷����̂ł��B
�@�o�h�b�P�U�e�P�X�R�U�ɂ͎��̂T�̃^�C�}�[������܂��B
�@Timer0�F�W�r�b�g�^�C�}�ŁA�O���N���b�N�̃J�E���g���\
�@Timer1�F�P�U�r�b�g�^�C�}�Ŕ��ɑ��@�\�B�X���[�v�����J�E���g�\�B
�@Timer2,4,6�F�}�C�R�������̃N���b�N���J�E���g���邾���̒P���ȂW�r�b�g�^�C�}���R��
�@�����ł͈�Ԏg�������ȒP��Timer2�i4�ł�6�ł������j���g���Ă݂܂��B
�@Timer2�i4��6�������j�ɂ��Ă̓f�[�^�V�[�g�̂P�V�͂ɏ����Ă���܂��B
�@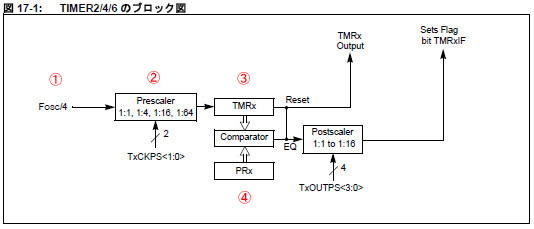
�@�T���͂��̂悤�ȃu���b�N�}�ŕ\����Ă��܂��B
�@�@�܂��A�^�C�}�[�ւ̃N���b�N�̓��͂��e�n�r�b�^�S�ɂȂ��Ă��܂��B�e�n�r�b�̓V�X�e���N���b�N�ł��B�����܂ł̃v���O�����Ɠ����悤���R�Q�l�g���œ��삳����ƁA�P�^�S�̂W�l�g�����s���������Q�ɓ����Ă��邱�ƂɂȂ�܂��B
�@�A�o�����������������̓v���O�����Őݒ�ł���v���X�P�[���i�������u�j�ŁA�N���b�N���P�^�P�A�P�^�S�A�P�^�P�U�A�P�^�U�S�ɕ������܂��B���Ƃ��P�^�U�S�ɐݒ肷��ƃN���b�N���U�S�����ƂP�N���b�N�̏o�͂��s�l�q�Q�ɏo�āA�J�E���g���P�オ��܂��B
�@�B�s�l�q�Q���J�E���^�{�̂ŁA�����Ă����N���b�N�ɂ��J�E���g�A�b�v���s���܂��B�s�l�q�Q�̒l�̓v���O��������ǂ�A�l�������������肪�ł��܂��B
�@�C�o�q�Q�͂��炩���߂����ɐݒ肵���l�Ƃs�l�q�Q�������l�ɂȂ����Ƃ��Ɂu���荞�݁v�Ƃ�������������܂��B���荞�݂͕ʂȃv���O�����������Ă����ꍇ�ł������炪�D��œ����o���A�Ƃ������̂ł��B���荞�ݐM���͂���Ɍ��ɂ��Ă���|�X�g�X�P�[���ŕ����ł��܂��B
�v���O����
�@�ł͎��ۂɐ��m�ȃ^�C�~���O�œ����v���O����������Ă݂܂��傤�B
�@�`���[�g���A���̂P�j�`�R�j����������Ȃ�A���łɃv���W�F�N�g�͍���悤�ɂȂ��Ă��邩�Ǝv���܂��B�K���ȃv���W�F�N�g�����A���̂悤�Ɂ@main.c�@������ăv���W�F�N�g�ɒlj����Ă��������B
�@
�@�O�̂��߁A��Ɠ������e�̃e�L�X�g�t�@�C����p�ӂ��܂����B
�@Timer.txt �i�E�N���b�N�őΏۂ�ۑ��j
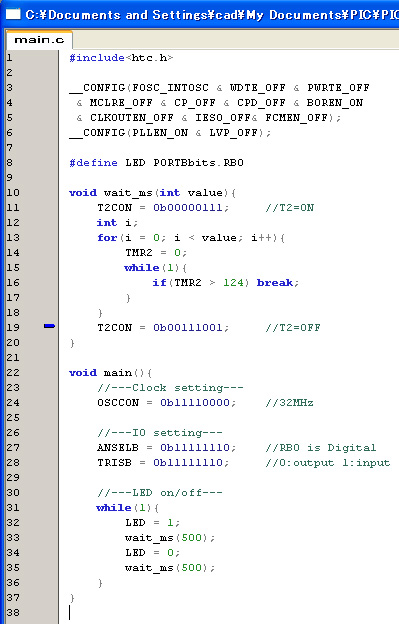
�@�قƂ�ǑO��̂k�d�c�̓_���ōs�������e�Ɠ����ł��B�Ⴄ�����̓E�F�C�g����镔���̍s�P�O�`�Q�O�ł��B�O��͓K���ȃ��[�v���ŃE�F�C�g������Ă��܂������A����̓^�C�}�[�Q���g���ăN���b�N���J�E���g���A�قڐ��m�ɃE�F�C�g�̎��Ԃ�����Ă��܂��B
wait_ms �Ƃ������O�̒ʂ�A�����ł�1mS���J�E���g���Ă���A����value �̉J��Ԃ����Ƃɂ��mS�P�ʂ̃E�F�C�g������Ă��܂��B
�@�s���������Q�̐ݒ肨��сA����̊J�n�^��~�́@�s�Q�b�n�m�@���W�X�^�ōs���܂��B�f�[�^�V�[�g�ł��̕��������Ă݂܂��傤�B
�@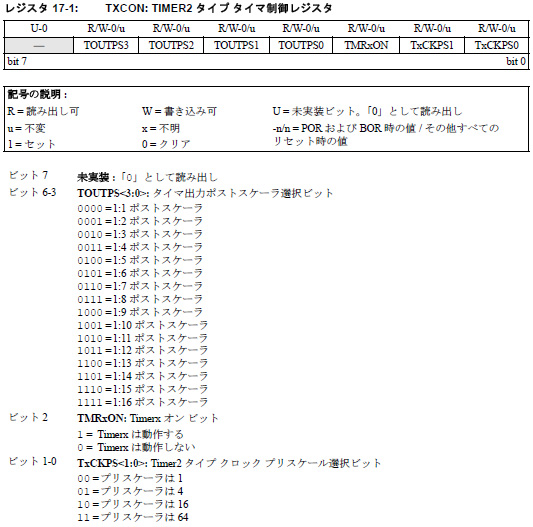
�@TMR2ON�r�b�g���P�ɂ���Ɠ��삪�J�n���܂��B�|�X�g�X�P�[���͍���͊W����܂���B
�@�v���X�P�[���ʼn������ɂ�����悢���H�Ƃ����Ƃ��낪���ł��B�s���������Q�͂W�r�b�g�J�E���^�Ȃ̂ŁA�O�`�Q�T�T�܂ł����J�E���g�ł��܂���B�Q�T�T�̎��͂O�ɖ߂�܂��B
�@�N���b�N�͂R�Q�l�g���A�܂�P�b�ԂɂR�Q�C�O�O�O�C�O�O�O�̃N���b�N���������Ă��܂����A�s���������Q�ɓ����Ă���̂�FOSC(32MHz)/4���WMH���Ȃ̂łP�b�ԂɂW�C�O�O�O�C�O�O�O�N���b�N�ɂȂ�܂��B�P���r���ƂW�C�O�O�O�N���b�N�ɂȂ�܂��B���̐��l�͂W�r�b�g�ł̓J�E���g�ł��܂���B�v���X�P�[���͂S��ނ̐ݒ肪����̂ł��ꂼ�ꓖ�Ă͂߂Ă݂܂��ƁA
��1:1 �@8000�J�E���g
��1:4 �@2000�J�E���g
��1:16 �@500�J�E���g
��1:64 �@125�J�E���g
�ƂȂ�܂��B
�@1:64���ƂQ�T�T�ȓ��̐��l�Ȃ̂łP��S���J�E���g�\�ł��B�Ƃ������Ƃōs�P�P�̐ݒ�ƂȂ�܂��B
�@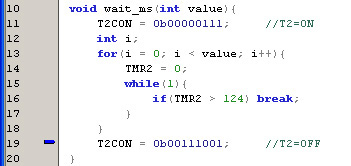
�@�s�P�U������ƁA���ۂɂ͂P�Q�S�J�E���g���Ă��܂��B����́A�O��̂��������ₗ�����������ő������Ԃ�H���̂łP�J�E���g���炵�Ē������Ă��܂��B
�@�����ŋC���t���܂������A�s�P�X�ׂ͂ɂ��̒l�łȂ��Ă��ǂ��ł��B�s�h�l�d�q�Q�n�m�r�b�g���O�ɂȂ肳������Ȃ�ł������ł��B�i�Ȃ�����Ȑݒ�ɂȂ��Ă������A�A�A�v���o���Ȃ��j
�@���C�����͎��̂悤�ɂȂ��Ă��܂��B
�@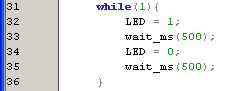
�@wait_ms(500)�@�łO�D�T�b�̃E�F�C�g�Ȃ̂ŁA�P�b�����łk�d�c���_�ł���v���O�����ɂȂ�܂��B
�@
�@
��������
�@���ۂɂ̓^�C�}�[���g���ăZ���T�[����̃p���X�����v��������A�t�ɐ��m�Ȓ����̃p���X���o���Â�����A�Ƃ����̂Ɏg���܂��B�z�r�[���{�b�g�ł悭�g���Ă��郉�W�R���T�[�{�̓p���X�Ő��䂵�܂��̂Ń^�C�}�[�̎g�������킩���Ă���ƃT�[�{�������Ƃ��\�ł��B���̓��W�R���T�[�{�̋쓮���@�ɂ��āB
�Q�O�P�O�N�V���Q�O��
|