ベストテクノロジー社のH8/3694Fマイコンボード(商品名はBTC064)はツクモROBOT王国のページから購入できます。
 RH26-1
RH26-1
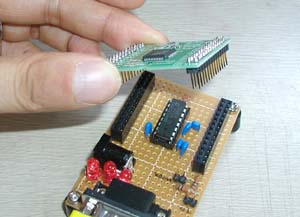
中身はマイコンボード、ピンヘッダ、PCケーブル、GCC(CD-ROM)、マニュアルが入っています。
 RH26-2
RH26-2
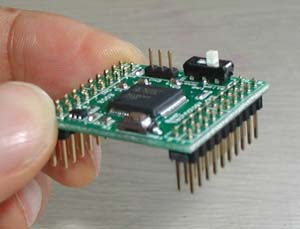
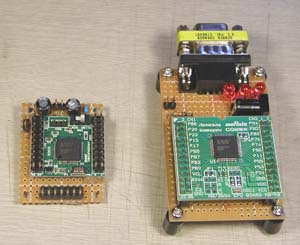
マイコンボードは乾電池と比べてもわかりますがかなり小さいです。しかも裏側には4KビットのEEPROMまで付いています。小さいことはいいことだ。
ロボット用ボードの作成
購入時のままでは取り付け穴などがありませんので通常はピンソケットをつけた基板にさして使うことが想定されています。
 RH26-3
RH26-3
これは以前作った別なボード(トランジスタ技術の付録+自作基板)ですが、通常はこのように基板にコネクタを付けてさすようになっています。
 RH26-4
RH26-4
ということで普通はこのように取り付けるべきですが、ロボットを作成するときにいろいろと配線を変えたりしたいので
 RH26-5
RH26-5
上側に出してピンを自由に使えるようにと考えました。浅草ギ研のセンサーやモータコントローラなどを使う場合にはGNDや+5Vラインがもっと必要なのでどのみちこれ以外の基板が必要ですがスペースは稼げます。また、バッテリ駆動にしたいので+5V電源の作成も必要になります。
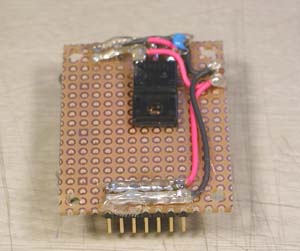
5V電源回路はこのようになります。
これで、ラジコン用バッテリ(6V~7.4V)や、9V乾電池でも駆動できるようになります。
(たくさんのセンサーやコントローラを使う場合は7805ではなく、LM2940CT-5などの低ドロップ型レギュレータの使用をおすすめします。)
 RH26-6
RH26-6
電源回路を追加し、このようになりました。基板下の方の2列のピンは上の列が+5V、下の列がGNDになっていて、センサーなどにも電源を供給できるようにしてます。基板の大きさは浅草ギ研のロボット「雷電」の基板取り付け寸法と同じ(3.5x4.5cm、穴ピッチ29mmx39mm)にしてみましたので雷電に取り付けることも可能。
マイコンボード(緑)と、5V電源ボード(茶色)は両面テープ&ホットボンドで接着してます。この組み合わせだと強力に接着されますが、はがそうと思えばはがせるという感じです。
 RH26-7
RH26-7
5VレギュレータICはスペースの都合で裏面に取り付けました。放熱板をつけてないのでちょっと心配。むき出しの配線部はロボットに使用することを考えてホットボンドでカバーしてありまます。ネジや、フレームが接触してショートしないように。
 RH26-8
RH26-8
以前作ったトラ技の付録のボートとの大きさ比較です。同じ機能でほぼ半分にできました。(しかも、右は電源回路無し)
開発環境のセットアップ
GCC Developer Light (以下GDL) という開発環境のCD-ROMが添付されていますのでインストールをします。私がこのマイコンボードを購入したのはだいぶ前だったのでベストテクノロジーのホームページで確認したところ案の定バージョンアップされていたのでダウンロードしてからインストールしました。GDLはLinuxの開発環境であるGCCに機能を追加してめんどうな設定をなくし、Windows版にしたものです。これは製作しているベストテクノロジー社のホームページのダウンロードから無償でダウンロードすることができます。
CD-ROMのインストーラとバージョンが違うので、念のためCD-ROM内をハードディスクにコピーして、ダウンロードした新しいバージョンをGDLフォルダ内に移動してからインストールしました。
GDLを始めて立ち上げると
 RH26-10
RH26-10
このようなウィンドウが開きます。今回使用するマイコンはH8/3694Fなのでこれを選択してOKを押します。これでデフォルトで3694Fを開発する設定になるのですが、他のマイコンを使用する場合は設定を変更することもできます。(つまり他のH8、SHマイコンの開発をする設定に変更も後でできます。)
LEDによる動作確認
ハードウェアが出来たっぽいので、取り扱い説明にあるようにLEDを2個使って動作テストをしてみます。
 RH26-11
RH26-11
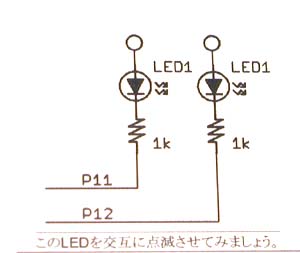
取り扱い説明のLEDの図です。ブレッドボードなどで簡単にテスト、とも考えましたがどうせやるなら後でもつかえるようにした方が良いと思い、
 RH26-12
RH26-12
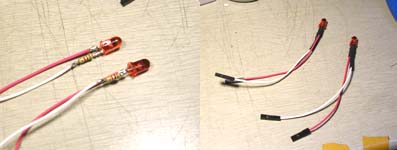
このようにLEDに抵抗と2550コネクタ(浅草ギ研で販売してます)をつけてマイコンボードに抜き差しできるようにしました。赤い線を+5V、白をP11又はP12につなぎます。
 RH26-13
RH26-13
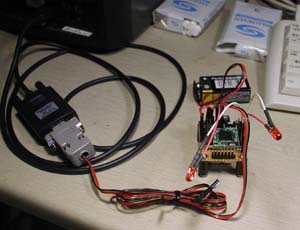
LEDを取り付けてPCと接続したところです。COM1はPCの裏側にあって接続が面倒なので、PC前面のUSBポートにUSB-シリアルアダプタ(浅草ギ研で販売してます。)を経由してマイコンボードに接続しています。
 RH26-14
RH26-14
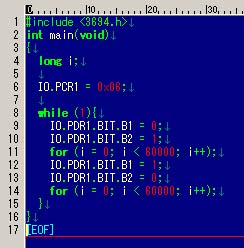
プログラムは取り扱い説明にあるのをそのままエディター領域に書き込み保存します。
このエディターはコマンド部分の色が変わるなど、わかりやすいし使いやすいものになっていると思います。
F9を押すとビルド、つまりコンパイルとリンクを同時に行います。問題がなければエディター下の部分に「コンパイル成功」と出てきます。表示も日本語でわかりやすいですね。私の所管では、ルネサスの開発環境HEWよりもビギナーに優しいつくりになっていると思います。
 RH26-15
RH26-15
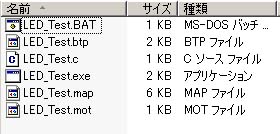
ビルドが成功すると保存したファイル名の拡張子が.motになっているファイルが作られます。(その他中間ファイルも多数作られますがマイコンに送るのはmotファイルのみです。)
 RH26-16
RH26-16
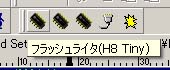
マイコンにプログラムを転送するにはフラッシュライタを使います。これはGDLとは別なソフトですがGDL上から起動できます。H8/3694FはH8/Tinyなのでこれを選びます。
 RH26-17
RH26-17
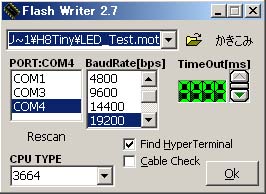
フラッシュライタ起動後にウィンドウ左上のICマークをクリック、又はウィンドウを右クリックでフラッシュライタの設定変更ができます。今回はUSB-シリアルアダプタを使っているのでCOMポートの番号を変える必要があります。(COMポート番号の確認方法についてはトラ技の付録を使ったページで説明してます。)私の環境ではCOM4になっていたのでCOM4に設定しました。
通信速度(BaudRate)は取り扱い説明によると19200以下に設定とありますがデフォルトで19200だったのでそのままにしました。
CPUタイプですが、H8/3694FはH8/3664シリーズなので3664のままでOKです。3694という表示はありませんでした。ちなみに3664と3694の違いはクロックスピードの違いだけのようです。(3694の方が速い)
設定後、マイコンボードのスイッチが「WRITE」になっているのを確認して電源を入れ、書き込みモードにします。
H8/3694はプログラムを書き込むモードとプログラムを実行するモードがあり、書き込みモードじゃないとプログラムを書き込むことはできません。
「かきこみ」を押すとマイコンボードにプログラムが書き込まれます。
スイッチを「RUN」にするとプログラムが動きます。
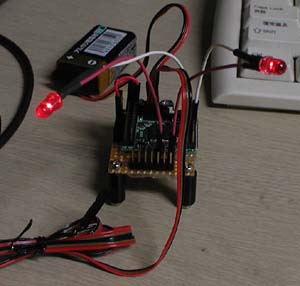 RH26-18
RH26-18
交互に点滅しだしました。
これでロボットにLEDをつけることができるようになりました。
最後に
浅草ギ研ではBASICスタンプマイコンを販売しています。これはBASICという比較的簡単な言語で動くマイコンで外部に接続した素子や回路などを比較的簡単な記述で動かす命令が付いていますので工学系の学校に行っていない方が使うには最適なものと言えます。
しかし、BASICスタンプは計算関係が苦手で小数点演算やマイナスの演算ができません。。
H8の場合は開発ツールの設定などが難しく、H8のハードウェアをある程度知っていないとプログラムを組むことができませんでした。しかし、GDLのように比較的簡単に(とはいってもスタンプよりは難しい)開発できるツールがありますので、センサー入力などを多数使い、計算によって歩行などの動きをするロボットをつくることは初心者の方でも不可能ではないでしょう。
これにはH8に関する書籍や、H8に関するマニュアル類(特にデータシート)をよく読んで勉強する必要があります。BTC064に添付のCD-ROMに添付されていますのでこれらを活用すると良いでしょう。
尚、重ねて申し上げますが、浅草ギ研ではBTC064の販売は行っておりませんのでこの製品およびH8/Tinyマイコン、GCCなどに関するご質問はご遠慮ください。
(このページではサクサク動いているように書いてありますが、ところどころハマっています。初心者の方はいきなり作り始めたり動かしたりするのではなく、添付の取り扱い説明やCD-ROMのドキュメント類などを(理解できなくても)よく読んでから実行することをお勧めします。特に電源を入れる前などは回路をよく確認しましょう。)
<関連リンク>
ツクモH8/3694マイコンボード販売のページ
ルネサスH8/3694シリーズのページ
<参考書籍>
C言語によるH8マイコンプログラミング入門 技術評論社 ISBN4-7741-1803-6
(作る前に一通り読んだ方が良いです。)
※このページを作成したときとはリンクページの内容が変わっている可能性があります。
2004年7月17日