Jinさん設計のロボット、Pirks・Rが話題を呼んでいます。寝る前にONOさんのページ(不定期日記ね)でロボットビルダーの最新情報を見るのが日課となってしまった私はPirksで使われているサーボのモニター募集の情報を発見して、メーカーのアイビー社のホームページを見ると、私がGWSに要求していたMicroMG改良のポイントが要所に盛り込まれているではないですか。。。
思えば数ヶ月前、1/100ガンプラをMicroMGで動かそうとして上手くいかず、GWSをだまくらかしてデジタル化させようと試んでいましたが国産で出るのであればそれに越したことはありません。
ということで思わずモニターを申し込んでしまいましたが、そのサーボが届きましたので、モニターを申し込んでいない方の参考ということで簡単にレポート。
ちなみに、ONOさんのページで物足りない夜はROBO−ONEあんてなをチェックして寝ます。(というかロボット作れよ。)
まず、JinさんのC1(Pirksの原型)も始めはMicroMG使ってましたので比較してみます。
 RH32-1 RH32-1
まず、ケーブルが長い。いーですねー。
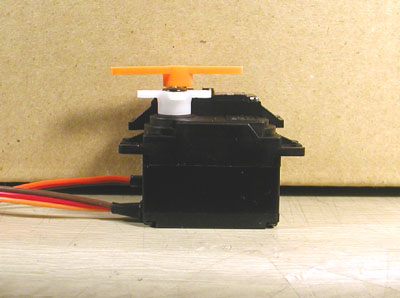 RH32-2 RH32-2
そして、低い。これはガンプラに入れようとした場合重要です。シルエット的に。
 RH32-3 RH32-3
幅は少し太いですが、シルエット的には問題なし。サーボ上の面も平らでよいです。
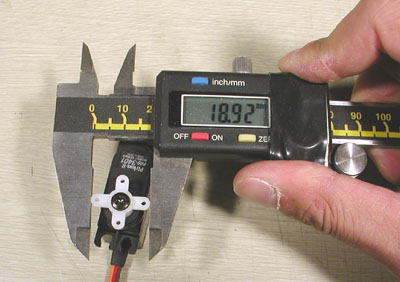 RH32-4 RH32-4
サーボホーンは十字型です。丸の方がカッコいいんですけどねー。大きさは18mmでまずまず。
ちなみにホーンの軸径はMicroMGとほぼ同じの8mm径です。最近、ギ研では16mm径のMicro用メタルホーンを作りましたので、やろうと思えば16mm丸型ホーンは作れると思います。
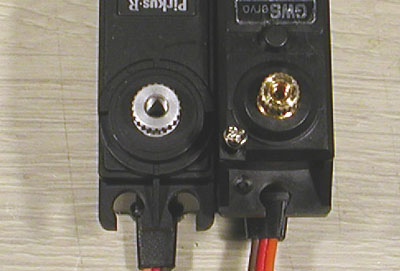 RH32-5 RH32-5
ギアの最終段は太くてステキです。ネジの取り付けは裏面から4点でM1.7ネジ(だと思う)で止めるようになってます。本当にM1.7だったら、改造したときに便利。
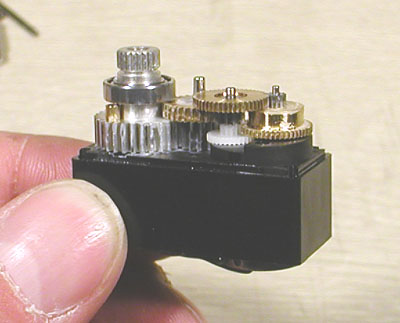 RH32-6 RH32-6
ギアは5段になってました。最終段ギアの軸は結構太いです。一段目(ピニオンの次。)はプラですね。
最終段が手では外せませんでした。まあ、ケースが良い形なので、外してケースを思いっきり改造、ということは無いでしょう。
 RH32-7 RH32-7
モータはMicroより太いですがちょっと短いモータです。上の写真はピニオンギアの位置を合わせた状態です。
左がPRS、右がMicro
 RH32-8 RH32-8
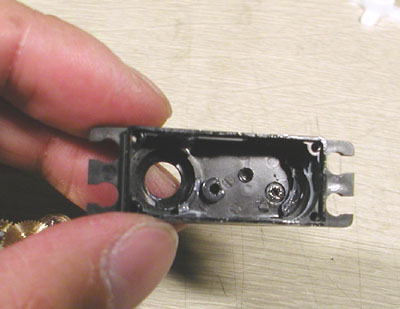
上蓋は普通です。KOのように軸受けに金属ブッシュは(いまのところ)無い様子。
 RH32-9 RH32-9
基板も簡単にハガせますので4649サーボ((c)よっすぃー体長)化も可能かと。
 RH32-10 RH32-10
4649化した場合はこのぐらいの幅でしょうか。
 RH32-11 RH32-11
スピードテストしましたがギアが1枚多いですがMicroとほぼ同じです。バックラッシュも当然少ない(というか、何もつけてないので触った感じはわからない。)。
 <-ちなみにサーボの方向は適当です。 <-ちなみにサーボの方向は適当です。
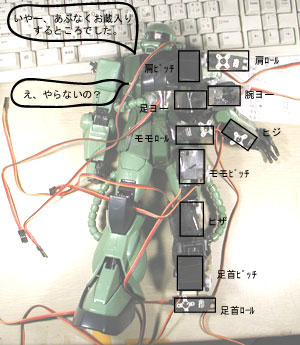
1/100ザクにテープで貼ってみました。
おー、いい感じだ。肩以外はまじめに内臓可能かも。あとは保持力がどうかというところですね。このザクは忙しいのでヨメに作らせましたが、おかげで”ザク”だけは判別してもらえるようになりました。(なにかの拍子でガンダムのTVを見たときに「ザクがやられてるー」と言ってました。ヤラれメカなんですけど。)
でもやりませんよ。
忙しいので。
PRS−3401のフレーム組み込みレポートなどは余裕があったらこのページで紹介する予定です。
2005年2月17日
|