| ソースファイル名 |
概要 |
コメント |
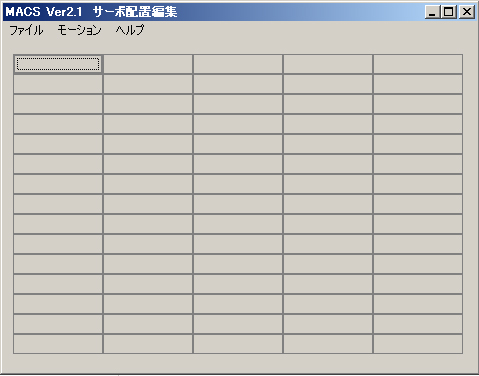
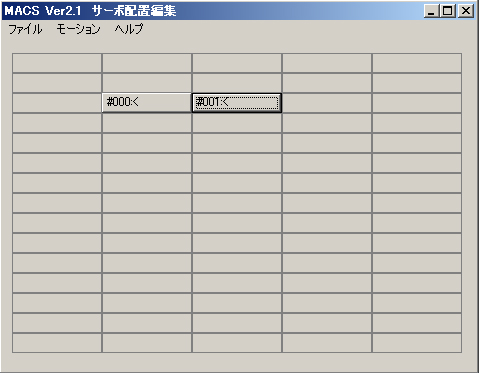
| Main.cs |
ファイルの読み込みやサーボレイアウトを設定するフォーム
その他クラスの記述もこのファイル内にある。
|
Mainという名前はついてますが単にサーボレイアウトを設定するぐらいで、MotionFormから開いても良いような気がするフォーム。
その他クラスもクラスというよりは単なるデータの入れ物になっているので改良の余地がたくさんある。 |
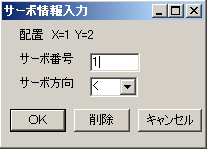
| ServoLayoutInfo.cs |
Mian.csから呼び出されるレイアウト詳細情報を入れるフォーム |
|
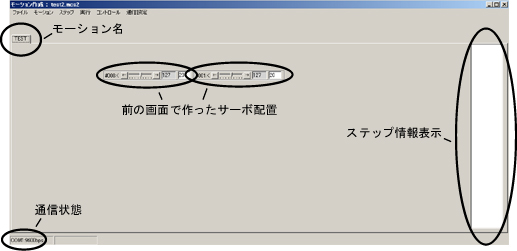
| MotionForm.cs |
モーション/ステップ作成、実行、通信設定を行うフォーム |
事実上のメインなところ。サーボとの通信関係もここにある。 |
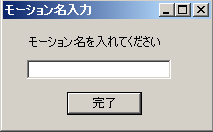
| MortionNameForm.cs |
MotionForm.csから呼び出されるモーション名を取得するフォーム |
|
| HomePositionform.cs |
ホームポジションの設定フォーム。MotionForm.csから呼び出される |
ここにも通信系の記述がある |
| AllSpeedInputForm.cs |
スピードの設定フォーム。MotionForm.csから呼び出される |
|
| RepeatRunForm.cs |
繰り返し実行フォーム。MotionForm.csから呼び出される |
|
| StepNameForm.cs |
ステップ名取得フォーム。MotionForm.csから呼び出される |
|
| ControlPanelForm.cs |
コントロールパネルフォーム |
|
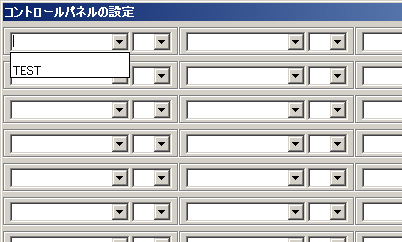
| InitControlPanelForm.cs |
コントロールパネル設定フォーム |
|
| CheckForm.cs |
汎用的なチェックフォーム |
|
| ComSetForm.cs |
通信設定フォーム |
|
| AssemblyInfo.cs |
作者情報など |
|