偼偠傔偵
丂愺憪僊尋偺儐乕僓乕偵PIC巊偄偑彮側偄側偀偲巚偭偰偄偨傜丄PIC偺HowTo傪傗偭偰偄側偄偙偲偵婥偑偮偒傑偟偨丅屄恖揑偵偼偪偭偝偔偰娙扨側傕偺傪嶌傞偲偒偵俉僺儞偺PIC傪傛偔巊偭偰傑偡丅
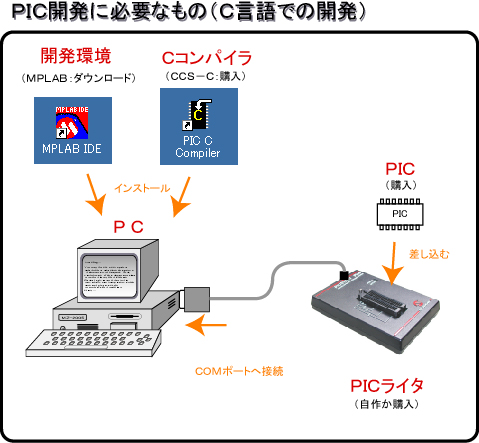
丂偲偄偆偙偲偱丄偙偙偱偼娙扨偵PIC偺巊偄曽偲愺憪僊尋惢昳偲偺愙懕偵偮偄偰愢柧偟偰偄偒傑偡丅
PIC偲懠偺儅僀僐儞
丂PIC偼奆條偍側偠傒偩偲偼巚偄傑偡偑屄恖偱傕娙扨偵擖庤偱偒偰僠僢僾忋偺僼儔僢僔儏ROM偵僾儘僌儔儉傪彂偒崬傫偩傝偱偒丄儂價乕偺揹巕岺嶌儐乕僓乕偺曽乆偵峀偔巊傢傟偰偄傞儅僀僐儞偱偡丅崱擔偺儅僀僐儞僽乕儉偼偙偙偐傜巒傑偭偨偲偄偭偰傕夁尵偱偼側偄偱偟傚偆丅徻偟偔偼Web忋傗彂愋偱忣曬偑戲嶳擖傝傑偡偺偱丄偙傟偐傜PIC傪巊偭偰傒傛偆偲巚偆曽偼偦偪傜偺曽傕嶲峫偵偟偰傒偰偔偩偝偄丅摿偵丄揹巕岺嶌偺彂愋傪懡偔幏昅偝傟偰偄傞屻娬揘栫巵偺儂乕儉儁乕僕偼昁尒偱偡丅
屻娬巵偺儁乕僕
揹巕岺嶌偺幚尡幒
PIC偼偳偆側偺丠偲偄偆偙偲偼偙偙偱傢偐傞偲巚偄傑偡偺偱丄偙偙偱偼懠偺儅僀僐儞偲偺斾妑傪偟偰傒傑偡丅
尰嵼丄悽奅偱儂價乕梡偲偟偰巊傢傟偰偄傞偺偼PIC偲AVR偱偡偑丄崙撪偱偼H8丄SH丄M16側偳傕巊傢傟偰偄傑偡丅偙傟埲奜偼彂愋傕偱偰偍傜偢丄巗斕偺儅僀僐儞儃乕僪傕柍偄偺偱儂價乕偱偼偁傑傝巊傢傟偰側偄傛偆偱偡丅
偙傟偼偁偔傑偱傕巹屄恖偺強姶偱偡偑丄嫵堢梡偲偄偆娤揰偐傜峫偊傞偲丄彂偒姺偊夞悢偺揰偱俹俬俠傗俙倁俼偑岦偄偰偄傞偲巚偄傑偡丅PIC丄AVR偼僼儔僢僔儏偺彂偒姺偊夞悢偑侾侽枩夞偱偡偑丄H8側偳偼彂偒姺偊曐徹偑侾侽侽夞掱搙偱偡丅幚嵺偵丄妛峑偱摫擖偟偨傜堦擭偱偮偐偊側偔側偭偨偲偄偆榖傪暦偒傑偡偑丄H8側偳偼傕偲傕偲偦偆備偆梡搑乮嫵堢偲偐乯偼憐掕偟偰側偄傛偆偱偡丅幵偲偐壠揹梡偺傛偆偱偡丅
傑偨丄愺憪僊尋偱偼俫俉俿倝値倷傪巊梡偟偨儃乕僪傪惢憿偟偰傑偡偑丄擔棫偺帪偼傛偐偭偨偺偱偡偑丄儖僱僒僗偵側偭偨偲偨傫偵擖庤惈偑埆偔側傝傑偟偨乮岲偒側偲偒偵彮検傪擖庤丄偲偄偆偺偑偱偒側偔側偭偨乯丅儂價乕偱嫵堢梡偺応崌偼宲懕揑偵擖庤偑偱偒側偄偲栤戣偑偁傞偲巚偄傑偡丅俹俬俠傗俙倁俼偩偭偨傜揹巕晹昳揦傗俢倝倗倝倠倕倷側偳偺捠斕僒僀僩偱娙扨偵擖庤偱偒傑偡丅
傑偁丄僠僢僾偐傜儘儃僢僩傪嶌傞偺偱偼側偔丄巗斕偺儅僀僐儞儃乕僪傪巊偆偲偄偆応崌偼暿偱偡偑丅
奐敪娐嫬偺擖庤
丂俹俬俠偺奐敪偼丄儊乕僇乕偺儂乕儉儁乕僕偐傜俵俹俴俙俛俬俢俤偲偄偆奐敪娐嫬偑柍彏偱僟僂儞儘乕僪偱偒傑偡丅塸暥偱偡偑丄MPLAB IDE
偲偄偆偲偙傠傪扵偟偰婥崌偱僟僂儞儘乕僪偟偰偔偩偝偄丅傑偨丄奺僠僢僾偺僨乕僞僔乕僩傕擖庤偱偒傑偡丅PIC傪傗傞応崌偼昁偢巊偆僒僀僩偱偡偺偱偍婥偵擖傝偵擖傟偰偍偒傑偟傚偆丅
儊乕僇乕乮MicroChip幮乯偺儁乕僕
塸岅偑偳偆偟偰傕僟儊偲偄偆応崌偼擔杮朄恖偺儁乕僕傕偁傝傑偡偑丄偁傑傝忣曬検偑懡偔側偄偺偱忋偺塸岅僒僀僩偵姷傟偨曽偑偄傠偄傠偱偒傑偡丅彯丄MPLAB偺巊偄曽偺擔杮岅斉偼壓婰偵偁傝傑偡偺偱丄偙傟偱庤偭庢傝憗偔PIC偺奐敪娐嫬偵姷傟偰丄嵶偐偄偲偙傠偼忋偺儁乕僕傪尒傞偲偄偆偺傕偁傝偐傕偟傟傑偣傫丅乮俀侽侽俆擭俉寧尰嵼偱MPLAB偺僶乕僕儑儞偼俈偱偡偑丄壓偺擔杮岅斉偼俇偲偄偆偺偑婥偵側傝傑偡偑丅乯
儅僀僋儘僠僢僾僥僋僲儘僕乕僕儍僷儞偺儁乕僕
丂傾僙儞僽儔偱偺奐敪偼MPLAB偩偗偱偱偒傑偡丅俹俬俠偺傾僙儞僽儔偵偮偄偰偼偄傠偄傠偲彂愋偑弌偰傑偡偺偱傾儅僝儞偁偨傝偱PIC偱専嶕偟偰傒偰偔偩偝偄丅
丂彯丄偙偺儁乕僕偱偼傾僙儞僽儔偼巊偄傑偣傫乮柺搢側偺偱丅乯丅
C僐儞僷僀儔傪峸擖偡傞
丂H8側偳偼僼儕乕偺C尵岅偺奐敪娐嫬偑僀儞僞乕僱僢僩偱擖庤偱偒傑偡偑丄巹偺抦傞尷傝偱偼PIC傪C偱奐敪偡傞応崌偼C僐儞僷僀儔傪峸擖偡傞昁梫偑偁傝傑偡丅峸擖偟偨C僐儞僷僀儔偼忋婰偺MPLAB偵慻傒崬傓偙偲偱丄MPLAB忋偱巊偊傞傛偆偵側傝傑偡丅
丂C僐儞僷僀儔偼儊乕僇乕偐傜傕弌偰傑偡偟丄偄傠偄傠側僒乕僪僷乕僥傿乕偐傜弌偝傟偰偄傑偡偑丄傎偲傫偳偼侾侽枩墌偖傜偄偟傑偡丅偦偺拞偱丄儂價乕梡偲偟偰偼怽偟暘側偄婡擻偑偁傞埨壙側僐儞僷僀儔偵CCS幮偺C僐儞僷僀儔偑偁傝傑偡丅偙傟偼塸岅斉偱偡偑擔杮偱偼
俬俹俬幮偺儂乕儉儁乕僕
偱攦偊傞傛偆偱偡丅
俠俠俽幮偺俹俬俠梡僐儞僷僀儔偵偼怓乆側庬椶偑偁傝傑偡偑丄儂價乕側偳偱巊傢傟傞堦斒揑側俹俬俠乮侾俇俥倶倶偲偐乯偵尷掕偟偨僶乕僕儑儞偺
俹俠俵偲偄偆僌儗乕僪偑俀枩俇愮墌偖傜偄偺傛偆偱偡丅塸岅偑弌棃傞曽偼奀奜僒僀僩傪扵偟偰峸擖偡傞偲傕偆偪傚偭偲埨偔側傞偐傕偟傟傑偣傫丅
俠俠俽幮俠僐儞僷僀儔偺俹俠俵乮埲屻俠俠俽亅俠乯傪峸擖偡傞偲丄娭悢側偳偑彂偄偰偁傞儅僯儏傾儖偲僜僼僩乮巹偑攦偭偨偲偒偼僼儘僢僺乕俀枃偱偟偨丅乯偑偍偔傜傟偰偒傑偡偺偱僀儞僗僩乕儖偟傑偡丅
偙偺偲偒丄拲堄揰偱偡偑丄昁偢
侾乯俵俹俴俙俛傪僀儞僗僩乕儖
俀乯俠俠俽亅俠傪僀儞僗僩乕儖
偺弴斣偱僀儞僗僩乕儖偡傞昁梫偑偁傝傑偡丅媡偩偲俠俠俽亅俠偑俵俹俴俙俛偵慻傒崬傑傟側偄偺偱拲堄偟傑偟傚偆丅傑偨丄俵俹俴俙俛偼僶乕僕儑儞偑傛偔曄傢傝傑偡偑丄俠俠俽亅俠傪俵俹俴俙俛偵慻傒崬傫偩屻偵俵俹俴俙俛傪僶乕僕儑儞傾僢僾偡傞偲慻傒崬傑傟偨俠俠俽亅俠偑奜偝傟傞偙偲偑偁傝傑偡乮宱尡嵪傒乯偺偱丄昁偢忋偺弴斣偵偟傑偟傚偆丅
俠俠俽亅俠傪僀儞僗僩乕儖偡傞偲師偺傛偆側傾僀僐儞偑弌棃傑偡丅

忋偑俵俹俴俙俛偱壓偑俠俠俽亅俠偱偡丅 俠俠俽亅俠扨懱偱傕僐儞僷僀儔傪摦偐偣傑偡偑丄俵俹俴俙俛偵慻傒崬傑傟偨忬懺偱偁傟偽俵俹俴俙俛撪偱俠傪彂偄偰丄僐儞僷僀儖乮俥侾侽僉乕乯傪偡傞偲帺摦揑偵俠俠俽亅俠偑婲摦偟偰僐儞僷僀儖偟偰偔傟丄寢壥傪俵俹俴俙俛撪偱昞帵偟傑偡偺偱丄俠俠俽亅俠扨懱偱婲摦偡傞偙偲偼柍偄偲巚偄傑偡丅
俹俬俠儔僀僞傪梡堄偡傞
俠偱彂偄偨僜乕僗僾儘僌儔儉傪僐儞僷僀儖偡傞偲丄俹俬俠偵彂偒崬傔傞宍幃偺僾儘僌儔儉偑弌棃忋偑傝傑偡丅偙偺僾儘僌儔儉傪俹俬俠偺僼儔僢僔儏儊儌儕偵彂偒崬傓昁梡偑偁傝傑偡偑丄偙傟偵偼愱梡偺婡夿偑昁梫偱偡丅偙傟傪俹俬俠儔僀僞偲尵偄傑偡丅
俹俬俠儔僀僞偼帺嶌傕偱偒傞傛偆偱丄乽俹俬俠儔僀僞丂帺嶌乿偱僀儞僞乕僱僢僩傪扵偡偲戲嶳偺椺偑弌偰偒傑偡丅巹偺応崌偼柺搢側偺偱俵倝們倰倧俠倛倝倫幮偺弮惓俹俬俠儔僀僞偱偁傞俹俬俠俽俿俙俼俿亅俹俴倀俽傪峸擖偟傑偟偨丅壙奿偼朰傟傑偟偨偑俀乣俁枩偩偭偨傛偆側婥偑偟傑偡丅
俹俬俠偺奐敪偵昁梫側傕偺乮傑偲傔乯
忋恾偺俹俬俠儔僀僞偼俹俬俠俽俿俙俼俿亅俹俴倀俽偱偡丅
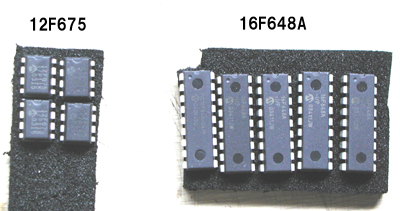
俹俬俠偵偼怓乆側庬椶偑偁傝傑偡偑丄彂愋側偳偱傛偔徯夘偝傟偰偄傞偺偑俹俬俠侾俇俥俉係俙偲偄偆傕偺偱偡丅偦偺懠丄婡擻傗僺儞悢偵傛偭偰怓乆側庬椶偑偁傝傑偡丅堦屄悢昐墌掱搙側偺偱丄怓乆側庬椶傪梡堄偟偰偍偄偰傕傛偄偱偟傚偆丅俠俠俽亅俠偵偼僔儕傾儖捠怣婡擻偑柍偄俹俬俠偵僔儕傾儖捠怣婡擻傪僜僼僩揑偵捛壛偡傞婡擻偑偁傝傑偡偺偱丄僔儕傾儖捠怣婡擻偺桳柍偼偁傑傝娭學側偄偱偡丅巹偑傛偔僗僩僢僋偟偰偄傞偺偼
仠侾俀俥俇俈俆乮俉僺儞偱彫偝偄丄俙俢僐儞僶乕僞晅偒乯
仠侾俇俥俇係俉俙乮俀侽僺儞偱懡婡擻丅侾俇俥俉係偺婡擻嫮壔宆偩偑廐梩偱埨偐偭偨傝偡傞丅乯
偁偨傝偱偡丅
偙偙偱偼娐嫬偺僀儞僗僩乕儖側偳丄徻偟偔愢柧偟傑偣傫偺偱奺帺儅僯儏傾儖傗彂愋傪傪尒側偑傜僙僢僩傾僢僾偟偰偔偩偝偄丅
俹俬俠偺俠偺曌嫮
俹俬俠偵偮偄偰偼戲嶳偺彂愋偑弌斉偝傟偰傑偡偺偱彂愋偱曌嫮偡傞偺偑堦斣憗偄偐傕抦傟傑偣傫丅傑偨偼慜弌偺揹巕岺嶌偺幚尡幒偺儁乕僕偱傕夝愢偝傟偰偄傑偡丅埲壓偼俹俬俠偺俠杮偺戙昞揑側傕偺偱偡丅
仭俠尵岅偵傛傞俹俬俠僾儘僌儔儈儞僌擖栧丂屻娬揘栫挊丂ISBN4-7741-1592-4
仭俠偵傛傞俹俬俠妶梡僽僢僋丂崅揷捈恖挊丂ISBN4-501-53560-1
偳偪傜傕CCS-C傪椺偵偲偭偰夝愢偟偰偄傑偡丅忋偺曽偑戲嶳偺娭悢偵偮偄偰愢柧偟偰偍傝丄僜僼僩僂僃傾偺儕僼傽儗儞僗偲偟偰傕巊偊傑偡丅壓偺曽偼幚嵺偵夞楬傪慻傒側偑傜恑傔傞偲偄偆姶偠偱偡丅丅
埲屻丄偙傟傜偺彂愋偺撪梕傪撉傫偱偁傞掱搙PIC傪廗摼偟偨偲偄偆慜採偱愢柧偟傑偡丅
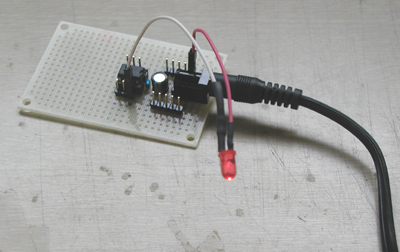
僞乕僎僢僩儃乕僪
忋偺幨恀傪傒偰傕傢偐傞偲偍傝丄PIC偼扨偵僠僢僾偺忬懺偱偡偺偱丄僾儘僌儔儉傪彂偒崬傫偱傕側偵傕摦偒傑偣傫丅嵟掅偱傕PIC偵揹尮傪嫙媼偡傞昁梫偑偁傝傑偡丅偲偄偆偙偲偱楙廗梡偵娙扨側儅僀僐儞儃乕僪傪嶌偭偰傒傑偡丅PIC偼侾俀俥俇俈俆偵偟傑偟偨丅側傫偲側偔丅
傑偢丄侾俀俥俇俈俆偺揹尮偺埵抲傪抦傞昁梫偑偁傝傑偡偺偱儊乕僇乕偺儂乕儉儁乕僕偐傜僨乕僞僔乕僩傪僟僂儞儘乕僪偟傑偡丅
MicroChip幮偺儂乕儉儁乕僕偺俿俷俹儁乕僕偵Datasheet偲偄偆偲偙傠偑偁傞偺偱僋儕僢僋偡傞偲PIC12F629/675DataSheet偲偄偆偲偙傠偑偁傝傑偡偺偱僋儕僢僋偟傑偡丅僨乕僞僔乕僩偼倫倓倖僼傽僀儖側偺偱傾僪價偺儕乕僟乕傪擖傟偰側偄偲昞帵偱偒傑偣傫偺偱拲堄偟偰偔偩偝偄丅傎偲傫偳偺俬俠偺僨乕僞僔乕僩偼倫倓倖宍幃偱攝晍偝傟偰偄傞偺偱撉傔傞傛偆偵偟偰偍偄偰壓偝偄丅
僨乕僞僔乕僩偑奐偄偨傜擮偺偨傔曐懚偟偰偍偒傑偡丅
係儁乕僕栚偖傜偄偵憗懍僺儞攝楍偑弌偰偄傑偡偺偱揹尮僺儞傪妋擣偟傑偡丅
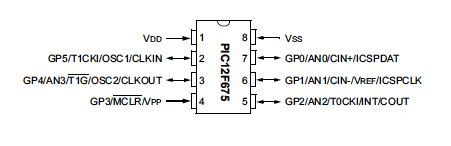
儅僀僐儞偼晛捠丄僋儘僢僋乮僋儕僗僞儖偲偐乯傪奜晅偗偡傞昁梡偑偁傝傑偡偑丄僨乕僞僔乕僩偺巒傔偺儁乕僕偺奣梫傪撉傓偲丄侾俀俥俇俈俆偼係俵俫倸偺撪憼僋儘僢僋偑偁傞傛偆偱偡丅偲偄偆偙偲偱乮娙扨偵嵪傑偣偨偄偺偱乯僋儘僢僋偼撪憼偺係俵俫倸傪巊偆偙偲偵偟傑偡丅偮傑傝奜晅偗僋儘僢僋柍偟丅
揹尮揹埑偱偡偑丄揹婥揑摿惈乮Electrical Specification偲偄偆偲偙傠丅塸岅傕偦偺傑傫傑偱偡側丅乯傪尒傞偲僋儘僢僋偑係俵俫倸埲壓偱俙俢僐儞僶乕僞傪巊梡偟側偄偲偒偼俀倁乣俆丏俆倁偱摦偔傛偆偱偡偑丄偁偲偱俙俢僐儞僶乕僞傕巊偄偨偄乮偲巚偆偲偒偑昁偢棃傞乯偺偱柍擄偵俆倁偵偟傑偡丅
傛偭偰丄倁倓倓乮侾斣僺儞乯偵俆倁丄倁倱倱乮俉斣僺儞乯偵俧俶俢傪偮側偓傑偡丅
偦偺懠偺僺儞偼丄偲傝偁偊偢偳偺傛偆偵偱傕偱偒傞傛偆偵僿僢僟僺儞傪偮偗偰偍偔偙偲偵偟傑偟偨丅
揹尮偱偡偑丄俆倁儗僊儏儗乕僞俬俠傪偮偗偰揹抮嬱摦偱偒傞傛偆偵偟偰偍偄偰傕椙偄偺偱偡偑丄幚尡梡側偺偱柺搢側偺偱巗斕偺俆倁偺俙俠傾僟僾僞傪巊偆偙偲偵偟傑偟偨丅俆倁儗僊儏儗乕僞偺揹尮夞楬偵偮偄偰偼俫俉傪巊偭偰傒傞偺偲偙傠傪嶲徠婅偄傑偡丅側偍丄偙偙偱巊偭偰偄傞俈俉侽俆偱側偔偰丄掅僪儘僢僾儗僊儏儗乕僞偺俴俵俀俋係侽俠俿亅俆偁偨傝傪巊偭偨曽偑椙偄偱偡丅僺儞攝楍偼摨偠偱偡偺偱丅
俙俠傾僟僾僞偼廐梩偱俇侽侽墌偖傜偄偺傪攦偄傑偟偨丅
偲偄偆偙偲偱夞楬恾偼師偺傛偆偵側傝傑偟偨丅
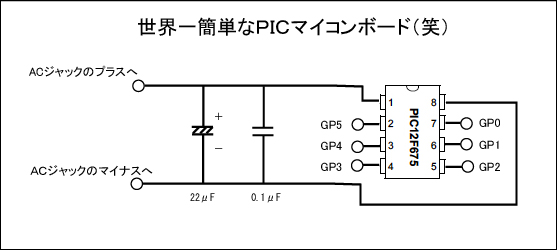
PIC偼僾儘僌儔儉傪彂偒崬傓偲偒偵儔僀僞偵憓偟傑偡偺偱丄捈愙僴儞僟晅偗偡傞偺偱偼側偔丄俉僺儞偺IC僜働僢僩傪巊偄傑偡丅
僐儞僨儞僒偼僲僀僘彍嫀梡偱偡偑丄偙傟傪偮偗側偄偲PIC偺岆摦嶌偺妋棪偑奿抜偵忋偑傝傑偡偺偱昁梫偱偡丅
GP偭偰偺偼General Purpose IO丂偮傑傝斈梡IO偺棯偱偡側丅
幚嵺偵嶌偭偨傕偺偑師偺幨恀偱偡丅
忋偺曽偺巐妏偄崟偄傕偺偼AC僕儍僢僋偱偙偙偵俆V偺AC傾僟僾僞傪嵎崬傑偡丅傑偨丄僙儞僒乕傗傜側偵傗傜傪愙懕偡傞偺偵揹尮偑昁梫側偺偱丄堦墳丄俆V偲GND偺僺儞傕惗傗偟偰偍偒傑偟偨丅
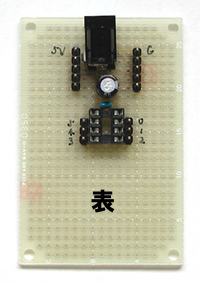 
AC傾僟僾僞偺抂巕偺嬌惈偱偡偑丄昞帵傪尒傞偲壓偺幨恀偺傛偆偵拞偑僾儔僗丄奜偑儅僀僫僗偲偄偆偺偑傢偐傝傑偡丅
偟偐偟丄幚嵺偵攝慄偡傞偲偒偼娫堘偊側偄傛偆偵僥僗僞乕偱僾儔僗儅僀僫僗傪應掕偟側偑傜僴儞僟晅偗偟偨傎偆偑柍擄偱偟傚偆丅
偙偙偱巊偭偰偄傞偺偼係A弌椡偺AC傾僟僾僞偱偡偑丄揹巕夞楬偩偗側傜侾A傕偁傟偽廫暘偱偡丅偙偺係A偺傾僟僾僞偼晛捠丄RC僒乕儃儌乕僞偺嬱摦僥僗僩傪偡傞偲偒偵巊偭偰傑偡丅
LED偺揰摂
丂偍傗偔偦偔偺LED偺揰摂偱偡丅
丂夞楬偼師偺傛偆偵側傝傑偡丅
亙夞楬恾亜
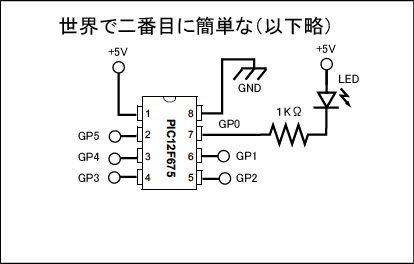
GP侽傪LOW乮侽V)偵偡傞偲亄俆V偐傜GP0傊揹棳偑棳傟偰LED偑揰摂偟傑偡丅掞峈偼揹棳惂屼梡(懠偺儁乕僕偺偳偙偐偵徻偟偔彂偄偰傑偡丅乯
亙僾儘僌儔儉亜
堦昩偍偒偵LED偑偮偄偨傝徚偊偨傝偡傞僾儘僌儔儉丅側傫偱偦偆側傞偐偼忋婰偱徯夘偟偨彂愋傪傛偔撉傒傑偟傚偆丅
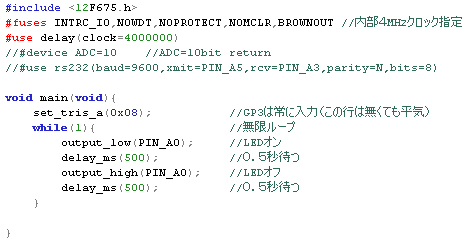
倖倳倱倕偺愝掕偩偗偑儈僜偱偡偑丄偦偺懠偼娙扨偭偡偹丅俬俶俿俼俠丵俬俷偲偄偆偺偑撪晹僋儘僢僋偺巜掕偱偡丅
俙俢俠偲僔儕傾儖捠怣偺愝掕偑僐儊儞僩偮傇偟偵側偭偰傑偡偑丄侾俀俥俇俈俆傪巊偆応崌偼偙偺俆峴傪傛偔巊偄傑偡乮巊偄傑傢偟丅乯崱夞俙俢俠偲僔儕傾儖偼巊偭偰側偄偺偱僐儊儞僩偱偮傇偟偰傑偡丅
偄偪偍偆丄僥僉僗僩僼傽僀儖丂LEDtest.c
亙寢壥亜
掞峈偼LED偺抂巕偵偔偭偮偄偰傑偡丅擬廂弅僠儏乕僽偱塀傟偰傞乮崟偄傗偮乯丅儕乕僪慄偵俀俆俆侽僐僱僋僞偺儊僗侾倶侾傪偮偗偰儃乕僪偵敳偒嵎偟偱偒傞傛偆偵偟偰傑偡丅
寢壥偼栤戣側偔摦嶌偟傑偟偨丅丂揹巕晹昳偨偭偨偺俆屄丅娙扨偩偀丅
師偼愺憪僊尋惢昳偲偺楢実傪傗傝傑偡丅
俀侽侽俆擭俉寧侾侽擔 |
| 丂 |
|