| 仭儂價乕儘儃僢僩晹昳偺惢憿丒斕攧丂 丂 儌乕僞僐儞僩儘乕儔丄僙儞僒丄壒惡丄夋憸丄柍慄儌僕儏乕儖側偳丄 仭儂價乕儘儃僢僩惂嶌婰帠偺儁乕僕丂乮奺庬儅僀僐儞丄俹俠偲偺愙懕帠椺乯 仭摿庩儊僀僋丄摿庩嵽椏偺斕攧丂仸摿庩儊僀僋偺僐乕僫乕偼偙偪傜偵堏傝傑偟偨丅 |
|
| 乥Top(偍抦傜偣) 乥惢昳徯夘 乥巊偄曽偲僒儞僾儖僾儘僌儔儉 乥捠怣斕攧 乥儕儞僋 乥儘儃僢僩宖帵斅 乥夛幮埬撪 乥 |
| 丂Easy Robotics for all enthusiastic people!!! 丂---HOBBY ROBOT PARTS SHOP ASAKUSAGIKEN---丂丂丂Since 2003... |
|
| 乮C乯Copylight 2003. 桳尷夛幮愺憪僊尋 | 捠怣斕攧偺朄婯乮朘栤斕攧朄戞俉忦乯偵婎偯偔捠怣斕攧嬈幰偺昞帵 |
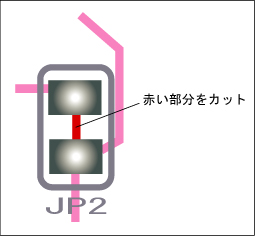
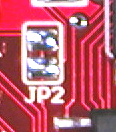 JP2偺條巕
JP2偺條巕