偼偠傔偵
丂偙偺儁乕僕偱偼丄價僊僫乕岦偗偵丄儅僀僐儞儃乕僪俹俬俠倧倢倧偺奐敪曽朄傪愢柧偟傑偡丅奐敪娐嫬偺梡堄傗柍彏偺俠僐儞僷僀儔偺僀儞僗僩乕儖偵偮偄偰偼偙偪傜丄僾儘僕僃僋僩乛僾儘僌儔儉嶌惉偵偮偄偰偼偙偪傜傪嶲徠婅偄傑偡丅
丂
丂仸埲壓偺忣曬偼2010擭7寧尰嵼偺傕偺偱偡丅偛拲堄偔偩偝偄丅
丂俹俬俠倧倢倧偵偮偄偰偼偙偪傜傪嶲徠婅偄傑偡丅
僷乕僣儕僗僩
| 僷乕僣 |
宆柤 |
屄悢 |
峸擖愭 |
| 儌乕僞 |
儅僽僠儌乕僞(RE-140側偳) |
1 |
柾宆揦側偳 |
| 僩儔儞僕僗僞 |
俀俽俠侾俉侾俆 |
1 |
揹巕晹昳揦 |
| 掞峈侾 |
100兌 1/4乣1/10W偺傕偺 |
1 |
揹巕晹昳揦 |
| 掞峈俀 |
10K兌 1/4乣1/10W偺傕偺 |
1 |
揹巕晹昳揦 |
| 婎斅 |
彫偝傔偺儐僯僶乕僒儖婎斅 |
1 |
揹巕晹昳揦 |
| 僐僱僋僞 |
俀倣倣僺僢僠僺儞僿僢僟 |
1 |
愺憪僊尋媦傃斕攧揦 |
| 働乕僽儖 |
僙儞僒乕働乕僽儖 |
1 |
愺憪僊尋媦傃斕攧揦 |
儅僀僐儞偺戝揹棳嬱摦
丂乽俴俤俢偺揰摂偲僗僀僢僠偺擖椡乿偺偲偙傠偱愢柧偟傑偟偨偑丄堦斒揑側儅僀僐儞偺抂巕偼悢倣俙乣悢廫倣俙傑偱偟偐揹棳傪棳偟偨傝堷偭挘傝崬傫偩傝偡傞偙偲偑偱偒傑偣傫丅俹俬俠侾俇俥侾俋俁俇偺応崌傕丄僨乕僞僔乕僩偵彂偄偰偁傞偲偍傝俀俆倣俙傑偱偟偐埖偊傑偣傫丅
丂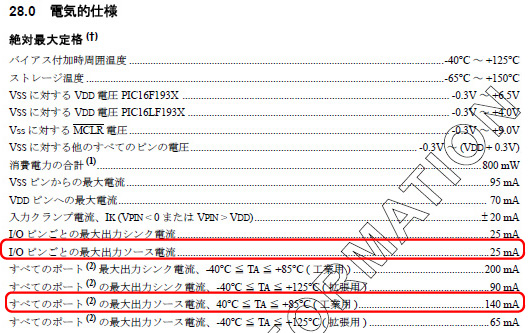
丂堦曽丄儅僽僠儌乕僞側偳偺俢俠儌乕僞偼丄夞揮偡傞偲偒偵悢俙棳傟傑偡丅偲偄偆偙偲偱丄儅僀僐儞偺抂巕傪捈愙儌乕僞偵愙懕偟偰傕丄儌乕僞偼夞傝傑偣傫丅偦偙偱丄僩儔儞僕僗僞傪巊偄傑偡丅
丂僩儔儞僕僗僞偼彫偝側揹棳傪丄戝偒側揹棳偵憹暆偟傑偡丅
丂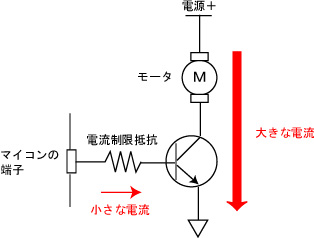
丂偙傟偼婎杮揑側夞楬偱偡丅偙傟偱傕摦偒傑偡偑丄戝偒側揹棳偑棳傟傞偺偱曐岇夞楬偑昁梫偵側傝傑偡丅偲偄偆偙偲偱捠忢偼壓偺傛偆偵側傝傑偡丅
丂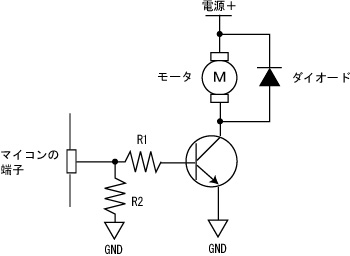
丂俼俀偼丄揹尮搳擖帪側偳偵儅僀僐儞偺抂巕偑晄埨掕偵側傞応崌偑偁傝傑偡偑丄偦偺偲偒偵傕妋幚偵僩儔儞僕僗僞偺儀乕僗傪俴倧倵偵偟偰偍偔偨傔偺僾儖僟僂儞掞峈偱偡丅僾儖僟僂儞梡側偺偱侾俲乣侾侽俲偖傜偄偱揔摉偵丅
丂僟僀僆乕僪偼丄儌乕僞掆巭偺弖娫偵敪惗偡傞媡婲揹椡乮儌乕僞偐傜媡偺揹棳偑棳傟傞乯傪摝偑偡偨傔偺傕偺偱偡丅
丂偲偄偆偙偲偱偙偺傛偆側夞楬傪嶌偭偰傒傑偟偨丅儅僀僐儞偺抂巕偼RC2偵偮側偄偱傑偡丅
丂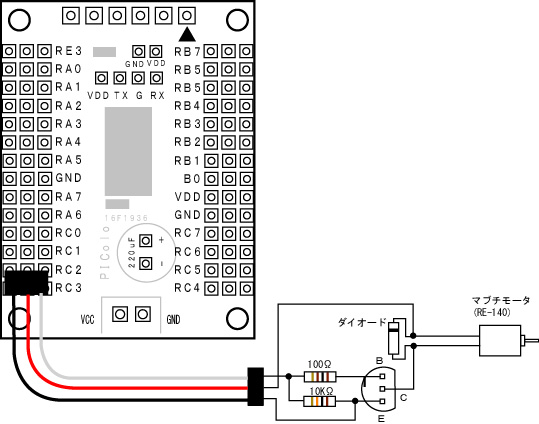
丂
丂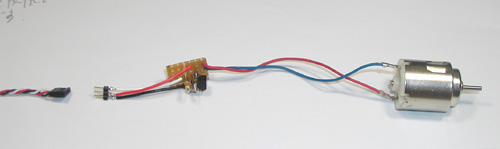
丂幚嵺偵偮偔偭偰傒偨幨恀偱偡丅僩儔儞僕僗僞偺夞楬偐傜偼俀倣倣僺僢僠僺儞僿僢僟傪弌偟偰丄愺憪僊尋偺僙儞僒乕働乕僽儖偱俹俬俠倧倢倧偵愙懕偱偒傞傛偆偵偟偰偄傑偡丅庢傝奜偟偑壜擻偱偡丅
丂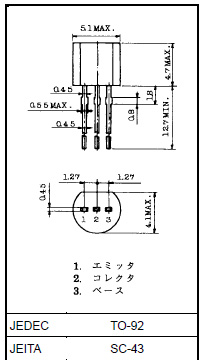
丂僩儔儞僕僗僞偼丄掕斣偱偁傝丄廐梩側偳偱傕堦戃偄偔傜偱攧傜傟偰偄傞俀俽俠侾俉侾俆傪巊偄傑偟偨丅抂巕偺攝楍偼偙偺傛偆偵側偭偰偄傑偡丅
儌乕僞乕俷俶乛俷俥俥僾儘僌儔儉
丂僾儘僌儔儉偲偼尵偭偰傕丄扨弮偵抂巕傪俷俶乛俷俥俥偡傞偩偗側偺偱娙扨偱偡丅偲傝偁偊偢嶌偭偰傒偨僾儘僌儔儉偑偙偪傜偵側傝傑偡丅
丂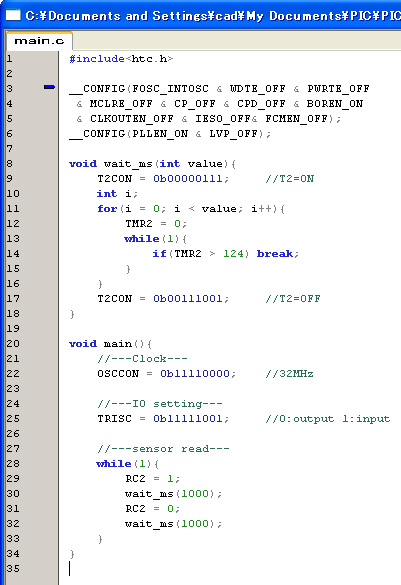
丂擮偺偨傔丄僥僉僗僩僼傽僀儖傕抲偄偰偍偒傑偡丅僾儘僕僃僋僩傪嶌偭偰俠僼傽僀儖偱捛壛偟偰偔偩偝偄乮徻偟偔偼慜儁乕僕嶲徠乯丅
丂MOTOR.txt
丂幚尡偟偰傒偨偲偙傠丄栤戣側偔丄侾昩偍偒偵儌乕僞偑傑傢傝傑偟偨丅俼侾傪彫偝偔偡傟偽懍偔傑傢傝傑偡丅媡偵戝偒偔偡傟偽抶偔側傝傑偡丅儌乕僞偵傛偭偰偼夞揮偡傞偺偵昁梫側揹棳偑堘偆偺偱丄偼偠傔偼俼侾傪戝偒傔偵偟偰丄偩傫偩傫彫偝偔偟偰偄偔偲傛偄偱偟傚偆丅偪側傒偵俼俤亅侾係侽偺応崌偼俼侾傪侾俲僆乕儉偖傜偄偵偡傞偲揹棳偑懌傝側偔偰夞傜側偔側傝傑偡丅偁傑傝彫偝偄掞峈偵偡傞偲揹棳偑棳傟偡偓偰夞楬偑擱偊傞偙偲偑偁傝傑偡偺偱拲堄偟偰偔偩偝偄丅
丂梋択偱偡偑丄儘儃僢僩僐儞僥僗僩側偳偱偼僊儕僊儕偺寁嶼偱夞楬傪慻傫偱偄傞偺偱丄儌乕僞僪儔僀僽夞楬偑擱偊傞偲偄偆偙偲偑傛偔偁傝傑偡丅戩忋偱幚尡偟偰偰傕丄偨偲偊偽側偵偐偺攺巕偵儌乕僞偺幉偑儘僢僋偟偨傝偡傞偲旕忢偵戝偒側揹棳偑棳傟偰擱偊傑偡丅昅幰傕壗搙偐宱尡偁傝丅偲偄偆偙偲偱戝偒側揹棳傪巊偆夞楬傪嶌傞応崌偵偼埨慡偵拲堄偟偰偔偩偝偄丅
俫僽儕僢僕夞楬
丂儌乕僞乕傪媡夞揮偝偣偨偄応崌偼丄捠忢偼俫僽儕僢僕夞楬偲偄偆傕偺傪巊偄傑偡丅愭偺儌乕僞俷俶乛俷俥俥偺夞楬傪儌乕僞偺僗僀僢僠偲傒偨偰偨応崌丄僗僀僢僠偑係偮偁傟偽惓揮偲媡揮傪惂屼偱偒傑偡丅
丂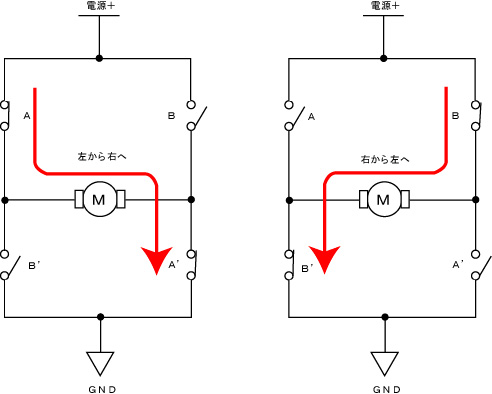
丂俙偲俙乫丄俛偲俛乫偺僩儔儞僕僗僞偑楢摦偟偰偄傞偲偟傑偡乮儀乕僗傪嫟捠偵偡傟偽楢摦壜擻乯丅俙宯摑偲俷俶偵偟偰俛宯摑傪俷俥俥偵偡傞偲揹棳偑嵍偐傜塃傊丄媡偵偡傞偲媡偵棳傟傑偡丅儌乕僞偼揹棳傪棳偡曽岦偱夞揮傕曄傢傝傑偡偺偱丄偙偺傛偆偵偟偰惓揮偲媡揮偑惂屼壜擻偲側傝傑偡丅
丂僩儔儞僕僗僞傛傝傕揹棳偑棳偣偰丄側偍偐偮墳摎偑懍偄傕偺偵俥俤俿偑偁傝傑偡丅偲偄偆偙偲偱丄偙偺傛偆側夞楬偺僗僀僢僠儞僌偵偼捠忢偼俥俤俿傪巊偄傑偡丅俥俤俿偺応崌丄偄傠偄傠偲惂栺偑偁傝丄扨弮偵俫宆偵攝抲偟偨偩偗偱偼惈擻偑傛偔偁傝傑偣傫偺偱丄傕偭偲戲嶳偺晹昳傪巊偄傑偡丅僌乕僌儖偱専嶕偡傞偲偄傠偄傠偲椺偑弌偰偒傑偡丅
丂俥俤俿傪巊偭偰夞楬傪慻傓偺偼寢峔柺搢側偺偱偡偑丄偙傟偑侾偮偺俬俠偵側偭偰偄傞傕偺偑儌乕僞乕僪儔僀僶俬俠偱偡丅廐梩側偳偱擖庤偱偒傑偡丅
儌乕僞僪儔僀僶俬俠
丂廐梩側偳偱傛偔攧傜傟偰偄傞儌乕僞僪儔僀僶俬俠偵俿俙俈俀俋侾偑偁傝傑偡丅偦偺僨乕僞僔乕僩偵僽儘僢僋恾偑彂偄偰偁傝傑偡丅
丂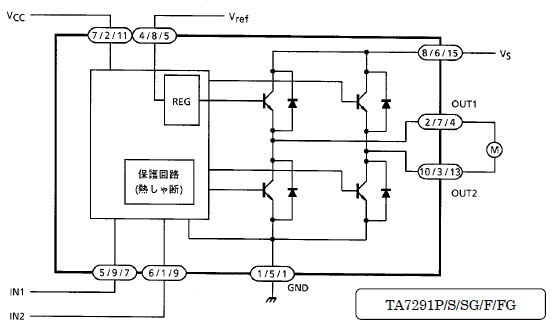
丂倁俠俠偼俬俠傊偺揹尮丄倁倰倕倖偼俫僽儕僢僕夞楬傊偺揹尮丄倁俽偼儌乕僞傊偺揹尮偵側傝傑偡丅偨偲偊偽丄俹俬俠倧倢倧偵偮側偖応崌偼偙偺俁偮偼慡晹揹尮亄乮姡揹抮偺僾儔僗丅係丏俆倁乯偵偮側偘偽傛偄偱偟傚偆丅俬俶侾偲俬俶俀偺抂巕偱惂屼偟傑偡丅
丂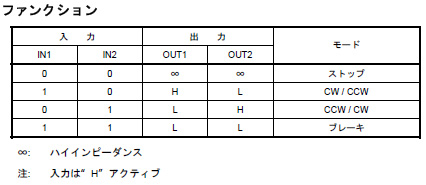
丂俬俶侾偲俬俶俀偺俫倝倗倛乛俴倧倵偱偙偺傛偆偵惂屼偡傞偙偲偑偱偒傑偡丅俠倂(ClockWise)偼帪寁夞傝丄俠俠倂(Counter
ClockWise)偼斀帪寁夞傝傪昞偟傑偡丅
丂儌乕僞僪儔僀僶俬俠偺巊偄曽偵偮偄偰偼丄扨偵抂巕傪俀屄偮側偄偱俫倝倗倛乛俴倧倵偡傞偩偗側偺偱偙偙偱偼愢柧傪徣棯偟傑偡丅
偝偄偛偵
丂儅僽僠儌乕僞側偳偺彫宆偺俢俠儌乕僞傪巊偭偨娺嬶側偳偼偨偔偝傫偁傝傑偡丅偙傟傪婡偵丄夡傟偰巊傢側偔側偭偨偍傕偪傖傪儅僀僐儞偱帺摦壔丄偲偄偆偺傕柺敀偄偐傕偟傟傑偣傫丅
丂師偼僗僀僢僠偵傛傞奜晹妱崬傒偵偮偄偰丅偨偲偊偽儌乕僞嬱摦拞偵嬞媫掆巭僗僀僢僠偵傛傞妱傝崬傒偱嬞媫掆巭丄偲偄偆偙偲偑壜擻偵側傝傑偡丅
俀侽侾侽擭俈寧俀俀擔
|