偼偠傔偵
丂俫俉側偳偺堦斒揑側巗斕偺儅僀僐儞儃乕僪偺応崌偼PC偲偺捠怣偑偱偒傞傛偆偵岺晇偝傟偰偄傞傕偺偑傎偲傫偳偱偡偑丄崱夞偺傛偆偵俹俬俠偺僠僢僾偐傜夞楬傪嶌傞応崌偼俹俠偲偺捠怣夞楬傪帺暘偱嶌傜側偗傟偽側傝傑偣傫丅
丂俹俠偲偺捠怣偼丄寁嶼寢壥偺妋擣側偳丄僾儘僌儔儉偺僨僶僢僋傪峴偆偲偒偵昁梫偱偡丅
丂偙偙偱偼俹俬俠偲俹俠傪僔儕傾儖捠怣偱愙懕偟丄俹俬俠偱寁嶼偟偨寢壥傪俹俠偵昞帵偡傞傑偱傪愢柧偟傑偡丅
丂彯丄俹俬俠偺奐敪曽朄偵偮偄偰偼慜偺儁乕僕乽俹俬俠傪巊偭偰傒傞乿傪嶲徠婅偄傑偡丅
夞楬
丂懠偺儁乕僕偱傕愢柧偟偰偄傑偡偑丄俆倁宯偺俿俿俴儗儀儖俬俠偲僾儔僗儅僀僫僗侾俀倁宯偺俹俠偺俠俷俵億乕僩乮俼俽俀俁俀俠揹埑儗儀儖乯傪捈愙愙懕偡傞偙偲偼偱偒傑偣傫丅偙偺揹埑嵎乮偟偐傕惓晧偑媡乯傪曄姺偡傞俬俠偺戙昞揑側傕偺偵俵俙倃俀俁俀偑偁傝傑偡丅慜夞偺幚尡儃乕僪偵俹俠偲偺捠怣婡擻傪晅偗偨傕偺偑師偺夞楬偵側傝傑偡丅
彯丄偙偙偱偼俧俹俆傪俿倶乮俹俬俠偐傜僨乕僞傪憲怣偡傞僺儞乯偵偟偰偄傑偡丅俧俹俆傪憲怣偵愝掕偡傞偺偼僜僼僩揑偵峴偄傑偡偑偙傟偵偮偄偰偼屻偱愢柧偟傑偡丅
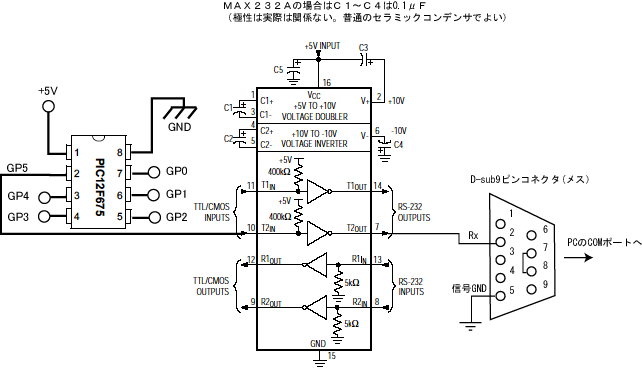
偙偙偱偼俵俙倃俀俁俀俙傪巊偄傑偡丅俵俙倃俀俁俀偺屻偵偮偔宆斣偵傛偭偰C1乣C5偺僐儞僨儞僒偺抣偑曄傢傝傑偡偺偱拲堄偟偰偔偩偝偄丅MAX232A偺応崌偼侽丏侾倳俥偱偡丅
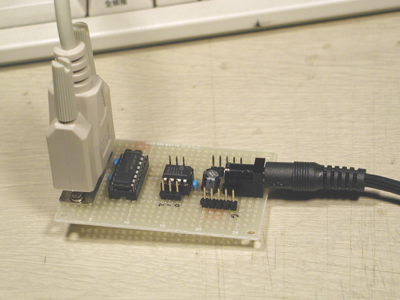
僨乕僞偼栴報偺曽岦偵棳傟傑偡丅恾偺傛偆偵俿俿儗儀儖偺僔儕傾儖捠怣僨乕僞傪俼俽俀俁俀俠儗儀儖偵曄姺偡傞偵偼僺儞侾侽偐傜僺儞俈丄枖偼僺儞侾侾偐傜僺儞侾係偵愙懕偟傑偡丅
俹俠偲偺愙懕偼僗僩儗乕僩偺僔儕傾儖働乕僽儖偱峴偄傑偡丅僐僱僋僞宍忬偼俠俷俵億乕僩偲摨偠俢亅倱倳倐俋僐僱僋僞偵偟傑偟偨丅晛捠偺僗僩儗乕僩偺僔儕傾儖働乕僽儖傪巊偆応崌偼俹俬俠儃乕僪懁偼乮儊僗乯偵側傝傑偡偺偱拲堄偟偰偔偩偝偄丅
俢亅倱倳倐僐僱僋僞偺俈丆俉斣僺儞偑僔儑乕僩偟偰偄傞偺偼丄俹俠懁偱俼俿俽乛俠俿俽僼儘乕惂屼偺偲偒偱傕捠怣偑偱偒傞乮偲偄偆偐俼俿俽乛俠俿俽傪柍帇偡傞乯傛偆偵偟偨傕偺偱偡偑丄俹俠懁偱僼儘乕惂屼偺愝掕傪昁偢乽柍偟乿偵偡傞応崌偼偙偺攝慄偼晄梫偱偡丅
俢亅倱倳倐俋僺儞僐僱僋僞偺俧俶俢乮僺儞俆乯偲懠偺俧俶俢乮俹俬俠偺僺儞俉傗俵俙倃俀俁俀偺僺儞侾俆乯偲愙懕偟傑偡偺偱拲堄偟偰偔偩偝偄丅價僊僫乕偺応崌丄捠怣偡傞夞楬傪慻傓偲偒偵丄俧俶俢傪嫟捠壔乮偮側偖乯偟側偄偱怣崋慄偩偗偮側偖曽偑寢峔懡偄偱偡丅
偦傟偱偼偝偭偦偔慜夞偺婎斅偵捛壛偟偰傒傑偟傚偆丅
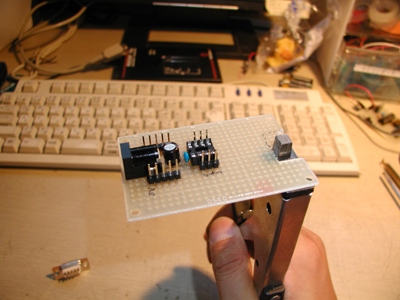
俢亅倱倳倐僐僱僋僞傪婎斅偵庢傝晅偗傞偨傔偵偼婎斅傪壛岺偡傞昁梫偑偁傝傑偡丅庤帩偪偵偁偭偨僐僱僋僞偑暯柺偵僱僕棷傔偡傞僞僀僾偩偭偨偺偱婎斅偵巐妏偄寠傪偁偗傑偟偨丅偙偺傛偆側偲偒偵偼幨恀偺傛偆偵僴儞僪僯僽儔偱壛岺偡傞偲娙扨偱偡丅
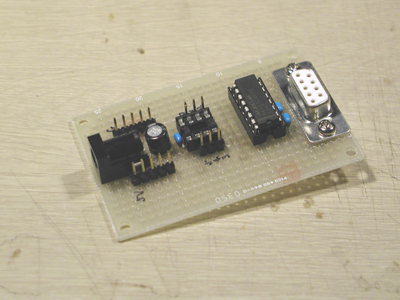
僐僱僋僞傪僱僕棷傔偟偰丄忋偺夞楬恾偺捠傝偵攝慄偟偨偺偑偙偺幨恀偱偡丅僐儞僨儞僒偺偆偪偄偔偮偐偼棤柺偵僴儞僟晅偗偝傟偰傑偡丅僐僱僋僞偺墶乮幨恀偱偼嵍懁乯偵偁傞偺偑俵俙倃俀俁俀偱偡丅
僾儘僌儔儉
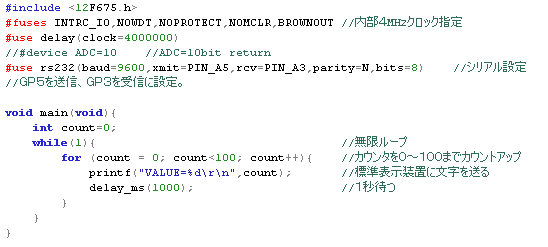
僥僉僗僩偼偙偪傜RCRCVtest.c
#use rs232...偺晹暘偱丄俠俠俽亅俠僐儞僷僀儔偺俼俽俀俁俀俠偵娭偡傞婡擻傪俷俶偵偟傑偡丅忋偺僾儘僌儔儉偱偼俧俹俆傪憲怣丄俧俹俁傪庴怣偵愝掕偟偰傑偡偑丄僾儘僌儔儉傪尒傟偽愝掕曽朄偼傢偐傞偐偲巚偄傑偡丅徻偟偔偼彂愋傪嶲徠婅偄傑偡丅偙傟傪峴偆偙偲偱僔儕傾儖捠怣偵娭偡傞婡擻偑巊偊傞傛偆偵側傝傑偡丅
幚嵺偵僨乕僞傪憲怣偡傞晹暘偼丂printf( )丂娭悢偺偲偙傠偵側傝傑偡丅晛捠丄俹俠偺俠宯偺尵岅偺応崌偼俹倰倝値倲倖娭悢偼昗弨昞帵憰抲丄偮傑傝儌僯僞夋柺偵暥帤傪昞帵偡傞傕偺偱偡偑丄俹俬俠偺応崌偼昗弨偱儌僯僞側偳偮偄偰側偄偺偱僔儕傾儖捠怣偱暥帤僨乕僞傪憲傞偙偲偵側傝傑偡丅偙偺娭悢傪幚峴偡傞偲#use
rs232...偺偲偙傠偺xmit偱巜掕偟偨僺儞偐傜僨乕僞偑憲怣偝傟傞偲偄偆傢偗偱偡丅
printf娭悢偵偮偄偰偼俠尵岅偺嫵壢彂傪嶲徠偟偰偔偩偝偄丅偙偺僾儘僌儔儉偱偼倖倧倰暥偺曄悢count傪堦昩偍偒偵僇僂儞僩傾僢僾偟偰PC偵憲怣偟傑偡丅
僾儘僌儔儉偑偱偒偨傜僐儞僷僀儖偟偰PIC偵彂偒崬傫偱偔偩偝偄丅
仸倫倰倝値倲倖暥偺僶僢僋僗儔僢僔儏乮倰偲値偺慜乯偼僉乕擖椡偼亸偱偡丅俵俛俴俙俛忋乮偲偄偆偐暷崙偺僜僼僩乯偱偼忋偺夋憸偺傛偆偵昞帵偝傟傑偡丅亸倰亸値偼夵峴僐乕僪偱偡丅
PC偱偺暥帤偺庴怣
僾儘僌儔儉傪彂偒崬傫偩傜偝偭偦偔PIC儃乕僪偵嵎偟崬傫偱摦嶌妋擣傪偟偨偄偲偙傠偱偡偑丄崲偭偨偙偲偵巹偑巊偭偰偄傞娐嫬偱偼PC偺COM億乕僩丄偙偙偱偼COM侾傪PIC儔僀僞偵偮側偄偱偄傞偨傔丄PC偺COM偑傆偝偑偭偰偄傑偡丅
偲偄偆偙偲偱傑偢偼PIC儔僀僞偺捠怣傪愗傝傑偡丅偙傟偵偼MPLAB忋偱儔僀僞傪巊梡晄壜偵愝掕偡傞偩偗偱OK偱偡丅
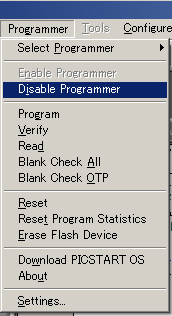
MPLAB偺Programmer->DisableProgrammer偱PIC儔僀僞偲偺捠怣傪愗抐偡傞偙偲偑偱偒傑偡丅Programmer偲偼PIC儔僀僞偺偙偲偱丄Disable偼晄嫋壜偲偄偆堄枴偱偡丅偪側傒偵嫋壜偼Enble偵側傝傑偡丅乮Disable丏丏丏偺忋偑Enable偱偡偺偱Dis偟偨屻Eneble偡傟偽傑偨PIC儔僀僞偑巊偊傞傛偆偵側傝傑偡丅乯
COM億乕僩偑奐偄偨偺偱PIC儃乕僪傪愙懕偟偰傒傑偟傚偆丅巹偼PIC儔僀僞偵丂PICSTART Plus丂傪巊梡偟偰傑偡偑丄偙傟偺働乕僽儖偼晛捠偺僗僩儗乕僩偺僔儕傾儖働乕僽儖側偺偱PIC儃乕僪偵偦偺傑傑巊偊傑偡丅傛偭偰丄儔僀僞偺僐僱僋僞傪敳偄偰偦偺傑傑PIC儃乕僪偵嵎偟崬傒傑偡丅
偪側傒偵懠偺PIC儔僀僞傪巊偭偰偄偰働乕僽儖偑柍偄応崌偼乽D-sub9僺儞僗僩儗乕僩 僆僗亅儊僗乿働乕僗僽儖傪梡堄偟傑偡丅乮傕偟偔偼D-sub僐僱僋僞偩偗攦偭偰偒偰偦傟偧傟偺僺儞傪捈寢偟偰帺嶌偡傞偐乯
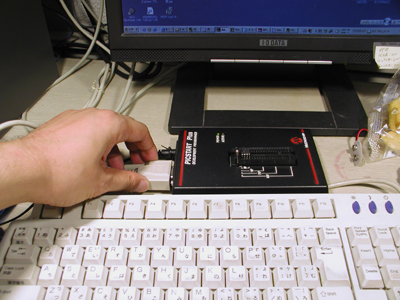
儔僀僞偺働乕僽儖傪敳偄偰
PIC儃乕僪偵憓偟傑偟偨丅
忋偱偼揹尮偑擖偭偰傑偡偑丄偙偺帪揰偱偼傑偩揹尮傪擖傟側偔偰椙偄偱偡丅
揹尮傪擖傟傞偲PIC偐傜暥帤僨乕僞偑憲傜傟傑偡偑丄PC偺曽偱偼COM侾偐傜擖偭偨僨乕僞傪昞帵偡傞僾儘僌儔儉傪棫偪忋偘偰偍偔昁梡偑偁傝傑偡丅Window偵偼昗弨偱捠怣僜僼僩乮僴僀僷乕僞乕儈僫儖乯偑偮偄偰傑偡偺偱偙傟傪巊偄傑偡丅
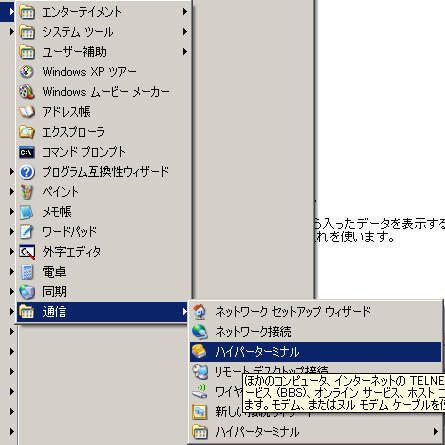
僗僞乕僩亅亜僾儘僌儔儉亅亜傾僋僙僒儕亅亜捠怣亅亜僴僀僷乕僞乕儈僫儖
傪慖傃傑偡丅
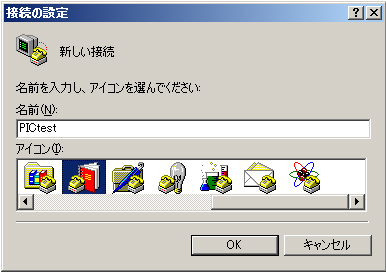
揔摉側柤慜偲傾僀僐儞傪慖傫偱OK傪墴偟傑偡丅
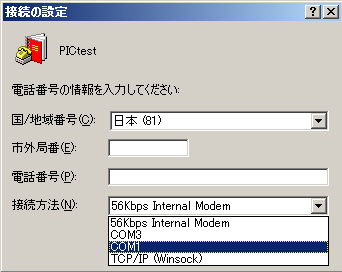
僴僀僷乕僞乕儈僫儖偼婎杮揑偵儌僨儉偺捠怣傪堄幆偟偰傑偡偺偱偙偺傛偆側僂傿儞僪僂偑奐偒傑偡偑丄愙懕曽朄偺偲偙傠偱COM億乕僩傪慖傇偲COM偱捠怣偡傞偙偲偑偱偒傑偡丅偙偙偱偼尰嵼働乕僽儖偑偮側偑偭偰偄傞COM侾傪慖戰偟傑偡丅
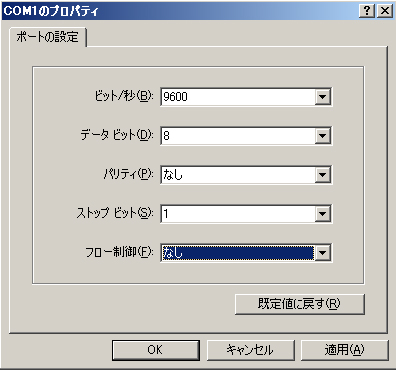
COM1偺愝掕傪偟傑偡丅忋偺僾儘僌儔儉偺#use rs232...偱愝掕偟偨捠怣懍搙丄崱夞偼俋俇侽侽倐倫倱傪愝掕偟傑偡丅傑偨丄僼儘乕惂屼偼峴傢側偄偺偱乽側偟乿偵愝掕偟傑偡丅偦偺懠傕忋偺捠傝偱偡丅
愝掕偑廔傢偭偨傜OK傪墴偟傑偡丅偙傟偱捠怣偑壜擻側忬懺偵愝掕偝傟傑偟偨丅乮傑偩捠怣偼偱偒傑偣傫乯
偪側傒偵丄MPLAB偺曽偱PIC儔僀僞偲偺捠怣傪愗偭偰側偄偲偙偺傛偆側昞帵偑弌傑偡丅僥儗僼僅僯乕偭偰偺偑偄偄偱偡偹丅愄偼崱偲堘偭偰僷僜僐儞捠怣偼揹榖偲儌僨儉偱偟偨偐傜偹偊丅巹偼傕偭傁傜儅僀僐儞偲偺捠怣偵偟偐巊偭偰傑偣傫偑丅
捠怣傪奐巒偡傞偵偼揹榖傾僀僐儞傪墴偟傑偡丅
偙傟偱偡丅乽愙懕乿偲偐偱側偔偰揹榖偱偡丅儌僨儉梡側傕傫偱丅
偪側傒偵丄偦偺塃偺傾僀僐儞傪墴偡偲愙懕偑愗傟傑偡丅PIC儔僀僞傪巊偆偲偒偼愙懕傪愗偭偰偐傜PIC儔僀僞偵働乕僽儖傪偮側偓曄偊傑偡丅
偝偰偄傛偄傛揹尮傪擖傟偰傒傑偟傚偆丅娫堘偄側偐偭偨傜師偺傛偆偵昞帵偝傟傞偼偢偱偡丅
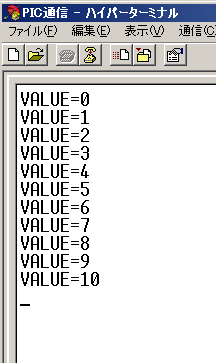
偙傟偱PIC偱峴偭偨寁嶼偑偁偭偰傞偐偲偐丄僙儞僒乕偐傜偺忣曬偺抣傪尒傞偙偲偑偱偒傞傛偆偵側傝傑偟偨丅
偪側傒偵丄僴僀僷乕僞乕儈僫儖偼扨偵PIC偐傜憲傜傟偨暥帤僨乕僞傪昞帵偟偰偄傞偩偗偱偡偺偱偙偺抣偱PC傪偳偆偵偐偡傞丄偲偄偆傛偆側巊偄曽偼偱偒傑偣傫丅偦偆備偆偲偒偼VisualBASIC傗C#偲偐偱Windows僾儘僌儔儉傪慻傓昁梡偑偁傝傑偡丅
揹尮傪敳偄偰傕偆堦搙憓偟偰傒傑偟傚偆丅崱搙偼傑偨侽偐傜僇僂儞僩偡傞偼偢偱偡偹丅
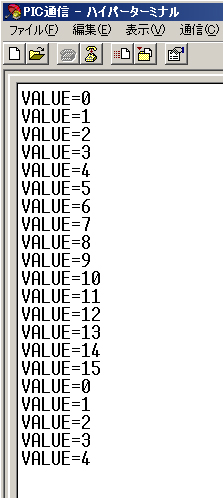
偲偄偆偙偲偱PIC偺僨僶僢僋傪峴偆偙偲偑偱偒傞傛偆偵側傝傑偟偨丅
俀侽侽俆擭俉寧侾侽擔 |
| 丂 |
|