| 柦椷抣 |
摦嶌 |
曽岦 |
僼僅乕儅僢僩 |
| 丂 |
乮儌乕僪愝掕丄懠乯 |
丂 |
丂 |
| 侽 |
8bit儌乕僪偵愝掕 |
憲怣 |
[255][ID][挿(1)][柦椷(100)]丂仸揹尮擖傝屻偼8bit儌乕僪偵愝掕偝傟偰傑偡 |
| 侾侽侽 |
12bit儌乕僪偵愝掕 |
憲怣 |
[255][ID][挿(1)][柦椷(100)] |
| 俀俆係 |
僙儖僼僠僃僢僋 |
憲怣 |
[255][ID][挿(1)][254] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(1)][254] |
| 丂 |
乮俉倐倝倲影霓乯 |
丂 |
仸揹尮擖傝屻偼8bit儌乕僪偵愝掕偝傟偰傑偡 |
| 侾 |
P1偺抣傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(1)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(2)][柦椷(1)][寢壥(0-255)]
寢壥0偼柍壸廳丄戝偒偔側傞傎偳壸廳偑憹偊傞丂乮埲壓摨條乯 |
| 俀 |
P2偺抣傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(2)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(2)][柦椷(2)][寢壥(0-255)] |
| 俁 |
P3偺抣傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(3)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(2)][柦椷(3)][寢壥(0-255)] |
| 係 |
P4偺抣傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(4)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(2)][柦椷(4)][寢壥(0-255)] |
| 侾侾 |
P1偺抣傪婰壇 |
憲怣 |
[255][ID][挿(1)][柦椷(11)] |
| 侾俀 |
P2偺抣傪婰壇 |
憲怣 |
[255][ID][挿(1)][柦椷(12)] |
| 侾俁 |
P3偺抣傪婰壇 |
憲怣 |
[255][ID][挿(1)][柦椷(13)] |
| 侾係 |
P4偺抣傪婰壇 |
憲怣 |
[255][ID][挿(1)][柦椷(14)] |
| 俀侾 |
P1偺嵎暘傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(21)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(3)][柦椷(21)][晞崋][寢壥(0-128)]
晞崋偼丂0:僾儔僗,丂1:儅僀僫僗 傪昞偡丂乮埲壓摨條乯 |
| 俀俀 |
P2偺嵎暘傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(22)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(3)][柦椷(22)][晞崋][寢壥(0-128)] |
| 俀俁 |
P3偺嵎暘傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(23)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(3)][柦椷(23)][晞崋][寢壥(0-128)] |
| 俀係 |
P4偺嵎暘傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(24)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(3)][柦椷(24)][晞崋][寢壥(0-128)] |
| 俁侽 |
P1-P4偺抣傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(30)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(5)][柦椷(30)][P1][P2][P3][P4]
P1,P2,P3,P4偼偦傟偧傟偺億僀儞僩偺寢壥丂乮埲壓摨條乯 |
| 係侽 |
P1-P4偺抣傪婰壇 |
憲怣 |
[255][ID][挿(1)][柦椷(40)] |
| 俆侽 |
P1-P4偺嵎暘傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(50)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(9)][柦椷(50)][晞崋][P1][晞崋][P2][晞崋][P3][晞崋][P4] |
| 俇侽 |
尰嵼偺廳怱埵抲傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(60)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(3)][柦椷(60)][X][Y]
柍晧壸丗X=Y=0 廳怱偑奜乮忋乯丗Y=255 廳怱偑奜乮壓乯丗Y=0 廳怱偑奜乮塃乯丗X=255
廳怱偑奜乮嵍乯丗Y=0 |
| 俈侽 |
尰嵼偺廳怱傪婰壇 |
憲怣 |
[255][ID][挿(1)][柦椷(70)] |
| 俉侽 |
憡懳廳怱傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(80)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(3)][柦椷(60)][X][Y]
婰壇帪偲摨偠廳怱埵抲偺応崌丗X=Y=127 |
| 丂 |
乮侾俀倐倝倲影霓乯 |
丂 |
仸揹尮擖傝屻偼8bit儌乕僪偵愝掕偝傟偰傑偡 |
| 侾 |
P1偺抣傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(1)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(3)][柦椷(1)][寢壥忋埵][寢壥壓埵]
寢壥偼俀僶僀僩偱曉怣偝傟傞丅12bit側偺偱丄寢壥忋埵偺bit4,5,6,7偵偼0偑擖傞 丂0000RRRR
RRRRRRRR丂乮R偼寢壥價僢僩丄埲壓摨條乯 |
| 俀 |
P2偺抣傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(2)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(3)][柦椷(2)][寢壥忋埵][寢壥壓埵] |
| 俁 |
P3偺抣傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(3)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(3)][柦椷(3)][寢壥忋埵][寢壥壓埵] |
| 係 |
P4偺抣傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(4)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(3)][柦椷(4)][寢壥忋埵][寢壥壓埵] |
| 侾侾 |
P1偺抣傪婰壇 |
憲怣 |
[255][ID][挿(1)][柦椷(11)] |
| 侾俀 |
P2偺抣傪婰壇 |
憲怣 |
[255][ID][挿(1)][柦椷(12)] |
| 侾俁 |
P3偺抣傪婰壇 |
憲怣 |
[255][ID][挿(1)][柦椷(13)] |
| 侾係 |
P4偺抣傪婰壇 |
憲怣 |
[255][ID][挿(1)][柦椷(14)] |
| 俀侾 |
P1偺嵎暘傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(21)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(4)][柦椷(21)][晞崋][寢壥忋埵][寢壥壓埵]
晞崋偼丂0:僾儔僗,丂1:儅僀僫僗 傪昞偡丂乮埲壓摨條乯 |
| 俀俀 |
P2偺嵎暘傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(22)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(4)][柦椷(22)][晞崋][寢壥忋埵][寢壥壓埵] |
| 俀俁 |
P3偺嵎暘傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(23)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(4)][柦椷(23)][晞崋][寢壥忋埵][寢壥壓埵] |
| 俀係 |
P4偺嵎暘傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(24)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(4)][柦椷(24)][晞崋][寢壥忋埵][寢壥壓埵] |
| 俁侽 |
P1-P4偺抣傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(30)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(9)][柦椷(30)][P1忋埵][P1壓埵][P2忋埵][P2壓埵][P3忋埵][P3壓埵][P4忋埵][P4壓埵]
P1,P2,P3,P4偼偦傟偧傟偺億僀儞僩偺寢壥丂乮埲壓摨條乯 |
| 係侽 |
P1-P4偺抣傪婰壇 |
憲怣 |
[255][ID][挿(1)][柦椷(40)] |
| 俆侽 |
P1-P4偺嵎暘傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(50)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(13)][柦椷(30)][晞崋][P1忋埵][P1壓埵][晞崋][P2忋埵][P2壓埵][晞崋][P3忋埵][P3壓埵][晞崋][P4忋埵][P4壓埵] |
| 俇侽 |
尰嵼偺廳怱埵抲傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(60)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(5)][柦椷(60)][X忋埵][X壓埵][Y忋埵][Y壓埵]
X,Y偼偦傟偧傟俀僶僀僩偱昞偝傟傑偡乮12bit儌乕僪偺柦椷侾嶲徠乯
柍晧壸丗X=Y=0 廳怱偑奜乮忋乯丗Y=4095 廳怱偑奜乮壓乯丗Y=0 廳怱偑奜乮塃乯丗X=4095
廳怱偑奜乮嵍乯丗Y=0 |
| 俈侽 |
尰嵼偺廳怱傪婰壇 |
憲怣 |
[255][ID][挿(1)][柦椷(70)] |
| 俉侽 |
憡懳廳怱傪曉偡 |
憲怣 |
[255][ID][挿(1)][柦椷(80)] |
| 丂 |
丂 |
庴怣 |
[255][ID][挿(5)][柦椷(60)][X忋埵][X壓埵][Y忋埵][Y壓埵]
婰壇帪偲摨偠廳怱埵抲偺応崌丗X=Y=2047 |
| 忋埲奜 |
柍帇偝傟傑偡 |
丂 |
丂 |


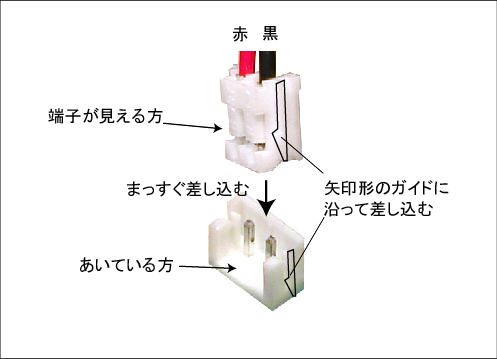
 亙亅僙儞僒乕晹丂晅懏偺働乕僽儖偱儌僕儏乕儖晹偲愙懕偟傑偡丅
亙亅僙儞僒乕晹丂晅懏偺働乕僽儖偱儌僕儏乕儖晹偲愙懕偟傑偡丅
 僙儞僒晹庢傝晅偗寠埵抲
僙儞僒晹庢傝晅偗寠埵抲