|
<概要>
■シリアル通信で、5VのON/OFFを制御するボード
AGB65−DOは、シリアル通信により8個のポートの5V信号出力をON/OFFできます。
■PWMでパワー制御!
8個のポートはそれぞれPWM制御により、0〜100%の出力制御ができます。たとえば、LEDを接続した場合はその明るさを調整することができます。モータを駆動する回路につけた場合は、モータの速度制御が可能となります。
■家電のコントロール!
オプションのAC100SSRとの組み合わせにより、家庭用のAC100V電源のON/OFFを行うことができます。
※AC100VはPWM制御はできません。ON/OFFのみ。
■豊富なインターフェイス!
AGB65−DOはマイコンなどと接続する一般的な5Vの非同期シリアルインターフェイスが標準装備ですが、オプションを使用することにより、PCなどのRS232C、USB、Bluetooth無線経由でコントロールすることも可能です。
■他のAGR65シリーズに接続可能!
他のAGB65シリーズのセンサやコントローラと同じシリアルラインを共有できます。AGB65シリーズについては「ロボット神経システムAGB65シリーズの説明」のページを参照願います。
■ID変更により4つまでのDOを1つのシリアルラインで駆動可能!
ハンダジャンパ設定により、IDを4種類に変更でき、同じシリアルラインに4つのAGB65−DOを配置、つまり同じシリアルラインで4x8=32個の出力を制御できます。
■最大460800bpsの高速通信が可能!
通信速度は9600、115200、460800bpsに設定が可能です。
※ご使用になるマイコンによっては正確な115Kが出ないものがありますので注意してください。クロックの選択は各マイコンのデータシートを参照願います(大抵は115200の倍数のクロックを使う必要があります。)。
※460800bpsはほとんどの機器では設定できない速度ですが、浅草ギ研のBluetooth無線は460800で通信できます。
■電源搭載で外部に電源回路不要!バッテリ駆動が可能!
ボード上に電源回路を内蔵し、外部に電源回路が不要で、バッテリなどで直接駆動することができます。
■29x33mmの超小型設計!
ロボットに基板を搭載する場合はその大きさがネックになりますが、本製品は極力小さい部品で構成されており、実装面積が小さくて済みます。
<仕様>
|
基板用電源
|
+6.5〜+15V (*1)
コネクタ:日圧B2B-EH |
|
基板消費電流
|
40mA |
|
出力電圧
|
0V/5V *PWM出力可能 |
|
PWM周期
|
標準1ms周期 |
|
PWM解像度
|
0〜100% 1%単位で指定 |
|
通信速度
|
9600bps/115.2kbps/460.8Kbps
(ハンダジャンパで設定) |
|
通信設定
|
8ビット、ノンパリ、ストップ1ビット フロー制御なし
非同期通信 |
|
通信規格
|
TTLレベルEIA232C準拠 (*2)
|
|
固有ID
|
140〜143 (IDについては下記説明に詳しく書いてあります。)
|
|
機能
|
●個別/一斉のON/OFF
●PWM出力
●ランダム出力
●点滅(簡易機能) |
|
寸法/重量
|
寸法29x33mm 重量:5g |
|
付属品
|
■AGB65電源ケーブルx1 (基板と9V乾電池をつなぐケーブル)
■電源延長ケーブルx1 ■AGB65通信ケーブルx1 |
(*1)高い電圧になるほど効率が落ち、発熱量が増えます。
(*2)5V系のマイコンと直結できます。PCと接続する場合は別売のAGB65-232Cが必用になります。3.3V系との接続は下記に説明があります。
<ピン配列>

<価格>
税込み 4,935円 (本体価格4,700円)
<オプション>
AGB65−USB 3,780円 (本体価格3,600円)
(USBで接続する場合に必用です。)
AGB65−232C 4,725円 (本体価格4,500円)
(PCと接続する場合に必用です。下記接続例を参照。)
Bluetooth無線機(本製品と接続するには下記2つが必要です。)
BlueMaster 12,600円(本体価格12,000円)
AGB65−BT 2,520円(本体価格2,400円)
<接続例>

※複数接続する場合は、消費電流合計以上の出力が出せるバッテリを使用してください。基板用の電源にアルカリ9V乾電池を使用する場合は最高で800mA前後です。ニッカドやニッケル水素はアルカリの5〜10倍ぐらい出力できます。(商品にもよります)
<USBで接続接続>
USBで接続する場合の詳細は、こちらを参照願います。
<Bluetoothで接続>
Bluetoothで接続する場合の詳細は、こちらを参照願います。
<マイコンとの接続詳細>

<PCとの接続>
PCと接続する場合は、AGB65-232Cに表示されている通りにケーブルを接続します。AGB65-232CにはPCのCOMポートへ接続するためのD-sub9ピンコネクタケーブルが付属していますので、これをPCへ接続します。この結果、上記マイコンとの接続の場合と同様に、PC(マスタ)のTXがコントローラのRXへ、PCのRXがコントローラのTXへ接続されます。

※PCの通信設定は「フロー制御無し、スターとビット1、ノンパリティ」に設定します。フロー制御無しの場合はPCはRTS/CTS信号を無視しますが、念のため、PCケーブル内部でRTS/CTSラインをループしており、これにより間違ってフロー制御=RTS/CTSになった場合、もしくは通信ソフト側でどうしてもRTSコントロールを行ってしまう場合でも、強制的に通信可能状態になります。
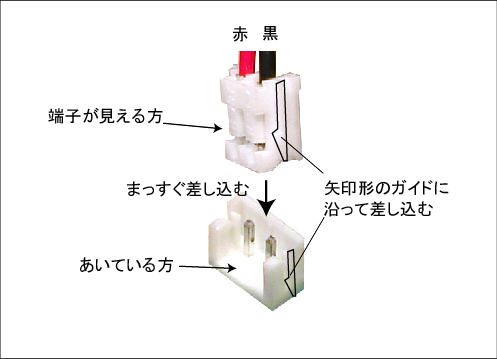
<電源ケーブルの接続>
AGB65電源ケーブルは、なれないと差し込みづらいので、下の図を参照に、慎重に差し込んでください。まっすぐに挿入すると簡単に入ります。簡単に入らない場合は無理をして端子を曲げないように注意して下さい。尚、逆に挿そうとすると入りません。
電源ケーブルの逆側には、9V乾電池用のスナップが付いております。これは簡易的なものなので、何回も乾電池を抜き差しするとスナップ部がゆるみますのでご注意下さい。9V乾電池以外の電源を使用する方は、ケーブルを切断してそれぞれの電源に合ったコネクタを取り付けて下さい。電源ケーブルを切断する際は、電源がつながっていないことを十分注意した上で行ってください。乾電池などが破裂する可能性があります。
<データ形式>
マスタからRSC2への指示は、4〜17バイトの数値データで送られます。バイトサイズ(8ビット)なので、表される数値は0〜255の256種類になります。
尚、以下特に記述がない場合は、数値は10進数で表しています。
−基本形−
データの基本形は次の通りになります。[ ]内は1バイトを表します。()内は送りえる数値の範囲を表します。
[シンクロバイト(255)] [ID(140-143)] [送信バイト数(1-14)] [命令1] [命令2] [命令3] ...
| シンクロバイト |
データの通信開始を知らせるデータで、常に「255」で始まります。 |
| ID |
ボードに設定された固有のID。(*) |
| 送信バイト数 |
送信される命令の(バイト)数。シンクロバイト、ID、送信バイト数は数えません。 |
| 命令 |
動作させたい命令。以下で詳しく説明します。 |
(*)DOの場合、出荷時のIDは140に設定されています。 |
注)データはキャラクタデータではなく、数値(バイナリ)データで送ります。
例えばマイコンをマスタとし、C言語でプログラムを作る場合に255を送信しようとして(PCや他の言語も考え方は同じ)、
printf("255");
とするのは間違いです。これですとキャラクタデータですので実際には2と5と5を表す3バイトのキャラクタデータが送られてしまいます。数値データに直すと[32][35][35]が送信され(ASCIIコード参照)、[255]ではないことになります。
unsigned char SINC = 255;
printf("%d",SINC);
で、[255]が1バイトだけ送られます。
※お使いのCコンパイラによっては構文がことなるかもしれません(printf関数がないとか、バイトサイズ変数の宣言はcharではなくintやbyteだとか)のでご注意下さい。
|
|
−命令の説明−
| 命令値 |
動作 |
方向 |
フォーマット |
| 0 |
全ポートLOW |
送信 |
[255][ID][長(1)][命令(0)] |
| 1 |
全ポートHIGH |
送信 |
[255][ID][長(1)][命令(1)] |
| 10 |
1ポートLOW |
送信 |
[255][ID][長(2)][命令(10)] [P#] |
| 11 |
1ポートHIGH |
送信 |
[255][ID][長(2)][命令(11)] [P#] |
| 20 |
1ポートPWM設定 |
送信 |
[255][ID][長(3)][命令(20)] [P#] [%(0-100)] |
| 30 |
全ポートPWM設定 |
送信 |
[255][ID][長(9)][命令(30)] [P1%(0-100)]
[P2%]..[P8%] |
| |
|
|
以下、拡張命令(使い方に注意) |
| 50 |
点滅1 |
送信 |
[255][ID][長(4)][命令(50)] [P#] [回数]
[点滅周期x100mS(1-254)] |
| 51 |
点滅2 |
送信 |
[255][ID][長(4)][命令(51)] [P#] [回数] [点滅周期x100mS(1-254)] |
| 52 |
ランダム |
送信 |
[255][ID][長(2)][命令(52)] [P#] |
| 60 |
スムーズOFF |
送信 |
[255][ID][長(3)][命令(60)] [P#] [時間x100mS] |
| 61 |
スムーズON |
送信 |
[255][ID][長(3)][命令(61)] [P#] [時間x100mS] |
| 90 |
PWM周期設定 |
送信 |
[255][ID][長(4)][命令(90)] [プリスケーラ][周期上位]
[周期下位] |
| 254 |
セルフチェック |
送信 |
[255][ID][長(1)][254] |
| |
|
受信 |
[255][ID][長(1)][254] |
| 上以外 |
無視されます。 |
|
|
※方向はマスタ側から見たデータの通信方向を表します。「送信」はマスタ−>コントローラへ送る命令、「受信」はコントローラ−>マスタへ返される結果を表します。
<フォーマットの説明>
| P# |
ポート番号を表します。1〜8の数値を指定してください。 |
| P1%-P8% |
各ポートのPWM値を指定します。0%〜100%で1%段階で指定します。(数値0〜100) |
プリスケーラ、
周期上位、下位 |
PWMの周期を設定します。詳細は下記で説明します。 |
|
【命令0:全ポートLOW】
<説明>
ポート1〜8までの全てのポートがLOW(0V)になります。
<送信フォーマット>
[255] [ID] [長(1)] [命令(0)]
・シンクロバイトは255で固定です。(データを送信する先頭は必ず255)
・IDはハンダジャンパで設定したIDを指定します。
・バイト長は1で固定です。
・命令は0で固定です。
<送信データ例>
ID=140のボードの全てのポートをLOWにする場合は次のようになります。
[255] [140] [1] [0]
【命令1:全ポートHIGH】
<説明>
ポート1〜8までの全てのポートがHIGH(5V)になります。
<送信フォーマット>
[255] [ID] [長(1)] [命令(1)]
・シンクロバイトは255で固定です。(データを送信する先頭は必ず255)
・IDはハンダジャンパで設定したIDを指定します。
・バイト長は1で固定です。
・命令は1で固定です。
<送信データ例>
ID=140のボードの全てのポートをHIGHにする場合は次のようになります。
[255] [140] [1] [1]
【命令10:1ポートLOW】
<説明>
指定したポートがLOW(0V)になります。
<送信フォーマット>
[255] [ID] [長(2)] [命令(10)] [P#]
・シンクロバイトは255で固定です。(データを送信する先頭は必ず255)
・IDはハンダジャンパで設定したIDを指定します。
・バイト長は2で固定です。
・命令は10で固定です。
<送信データ例>
ID=140のボードのポート6をLOWにする場合は次のようになります。
[255] [140] [2] [10] [6]
【命令11:1ポートHIGH】
<説明>
指定したポートがHIGH(5V)になります。
<送信フォーマット>
[255] [ID] [長(2)] [命令(11)] [P#]
・シンクロバイトは255で固定です。(データを送信する先頭は必ず255)
・IDはハンダジャンパで設定したIDを指定します。
・バイト長は2で固定です。
・命令は11で固定です。
<送信データ例>
ID=140のボードのポート7をHIGHにする場合は次のようになります。
[255] [140] [2] [11] [7]
【命令20:1ポートPWM設定】
<説明>
指定したポートの出力を調整します。
<送信フォーマット>
[255] [ID] [長(3)] [命令(20)] [P#] [%(0-100)]
・シンクロバイトは255で固定です。(データを送信する先頭は必ず255)
・IDはハンダジャンパで設定したIDを指定します。
・バイト長は3で固定です。
・命令は20で固定です。
・次にポート番号を1〜8の数値で指定します。
・次にPWM出力を0〜100の数値で指定します。(0〜100%に相当)
<PWM出力について>

AGB65-DOの場合、起動時のパルス周期は約1mSに設定されています。この状態で、LED点灯回路や、一般的なモータドライブ回路を駆動した場合は、その%に相当する出力(LEDなら明るさ、モータなら回転速度など)になります。
<注意>
オプションのAC100SSRを使えばAC100VのON/OFFは可能ですが、PWMを使ってのAC100Vのパワー制御はできませんのでご注意願います。AC100Vは50又は60Hzの交流で、それらをPWMでスイッチングしても、ONになるかOFFになるかのどちらかです。たとえば、電灯を接続した場合、PWM出力を出すとチラチラするか、まったく点かないか、ずっと点くか、になります。
AC100Vのパワー制御をする場合は、別な回路が必要になります。
<送信データ例>
ID=140のボードのポート3を68%出力にする場合は次のようになります。
[255] [140] [3] [20] [3] [68]
【命令30:全ポートPWM設定】
<説明>
ポート1〜8のPWM出力を一斉に設定します。
<送信フォーマット>
[255] [ID] [長(9)] [命令(30)] [P1%(0-100)] [P2%] [P3%] [P4%]
[P5%] [P6%] [P7%] [P8%]
・シンクロバイトは255で固定です。(データを送信する先頭は必ず255)
・IDはハンダジャンパで設定したIDを指定します。
・バイト長は9で固定です。
・命令は30で固定です。
・次に各ポートのPWM出力を0〜100の数値で指定します。(0〜100%に相当)
<送信データ例>
ID=140のボードのポート1を10%、ポート2を20%...ポート8を80%出力にする場合は次のようになります。
[255] [140] [9] [30] [10] [20] [30] [40] [50] [60] [70]
[80]
以下、拡張命令です。これらは、命令0〜30を使っても再現できます。使い方に注意してください。
【命令50:点滅1】
<説明>
指定したポートを、指定した回数、指定した点滅周期で点滅させます。
この命令は、LED点滅を想定したもので、簡易的に作ったものです。ご了承下さい。
<送信フォーマット>
[255] [ID] [長(4)] [命令(50)] [P#] [回数] [点滅周期x100mS(1-254)]
・シンクロバイトは255で固定です。(データを送信する先頭は必ず255)
・IDはハンダジャンパで設定したIDを指定します。
・バイト長は4で固定です。
・命令は50で固定です。
・次にポートを指定します。(1〜8)
・次に回数を指定します。
・次に、点滅する時間を100mS単位で指定します。たとえば、ここを3にした場合、300mS間HIGHの後、300mS間LOW、を指定回数繰り返します。
<注意>
この命令実行中は、他の命令を受け付けなくなりますので注意してください。たとえば、非常に長い点滅周期又は、非常に多い回数を指定した場合は、それが終了するまでは他の動作ができません。
動作中は、点滅命令も受け付けないので、この命令で複数一斉に点滅するのはできません。命令30までを使ってプログラムで実現してください。
<送信データ例>
ID=140のボードのポート6を300mS間隔で7回点滅させる場合。
[255] [140] [4] [50] [6] [7] [3]
【命令51:点滅2】
<説明>
指定したポートを、指定した回数、指定した点滅周期で点滅させます。
この命令は、LED点滅を想定したもので、簡易的に作ったものです。ご了承下さい。
点滅1とは違い、PWM出力で、だんだんHIGHになったあと、だんだんLOWになります。LEDを駆動した場合はボワっと明るくなり、スッと消える感じになります。
<送信フォーマット>
[255] [ID] [長(4)] [命令(51)] [P#] [回数] [点滅周期x100mS(1-254)]
・シンクロバイトは255で固定です。(データを送信する先頭は必ず255)
・IDはハンダジャンパで設定したIDを指定します。
・バイト長は4で固定です。
・命令は51で固定です。
・次にポートを指定します。(1〜8)
・次に回数を指定します。
・次に、点滅する時間を100mS単位で指定します。たとえば、ここを3にした場合、300mS間HIGHの後、300mS間LOW、を指定回数繰り返します。
<注意>
この命令実行中は、他の命令を受け付けなくなりますので注意してください。たとえば、非常に長い点滅周期又は、非常に多い回数を指定した場合は、それが終了するまでは他の動作ができません。
動作中は、点滅命令も受け付けないので、この命令で複数一斉に点滅するのはできません。命令30までを使ってプログラムで実現してください。
<送信データ例>
ID=140のボードのポート6を300mS間隔で7回点滅させる場合。
[255] [140] [4] [50] [6] [7] [3]
【命令52:ランダム】
<説明>
指定したポートを、100mS単位で0〜100%のPWM出力でランダムに出力します。LEDなどを駆動すると、不安定な発光に見えます。
<送信フォーマット>
[255] [ID] [長(2)] [命令(52)] [P#]
・シンクロバイトは255で固定です。(データを送信する先頭は必ず255)
・IDはハンダジャンパで設定したIDを指定します。
・バイト長は2で固定です。
・命令は52で固定です。
・次にポートを指定します。(1〜8)
<注意>
この命令を発行すると、そのポートだけランダムに出力しつづけます。命令0〜30の他の命令を実行すると、後から実行した命令の通りに動きます。
<送信データ例>
ID=140のボードのポート6をランダムに出力させる場合。
[255] [140] [2] [52] [6]
【命令60:スムーズOFF】
<説明>
指定したポートを、指定した時間をかけて、100%−>0%にします。LEDを駆動した場合、スッっと消える感じになります。
<送信フォーマット>
[255] [ID] [長(3)] [命令(60)] [P#] [時間x100mS]
・シンクロバイトは255で固定です。(データを送信する先頭は必ず255)
・IDはハンダジャンパで設定したIDを指定します。
・バイト長は3で固定です。
・命令は60で固定です。
・次にポートを指定します。(1〜8)
・次に時間を100mS単位で指定します。(1〜254)
<注意>
この命令実行中は、他の命令を受け付けなくなりますので注意してください。たとえば、非常に長い時間を指定した場合は、それが終了するまでは他の動作ができません。
動作中は、この命令自体も受け付けないので、この命令で複数一斉に点滅するのはできません。命令30までを使ってプログラムで実現してください。
<送信データ例>
ID=140のボードのポート6をスムーズにOFFさせる場合。
[255] [140] [2] [60] [6]
【命令61:スムーズON】
<説明>
指定したポートを、指定した時間をかけて、0%−>100%にします。LEDを駆動した場合、ボワッっと光る感じになります。
<送信フォーマット>
[255] [ID] [長(3)] [命令(61)] [P#] [時間x100mS]
・シンクロバイトは255で固定です。(データを送信する先頭は必ず255)
・IDはハンダジャンパで設定したIDを指定します。
・バイト長は3で固定です。
・命令は61で固定です。
・次にポートを指定します。(1〜8)
・次に時間を100mS単位で指定します。(1〜254)
<注意>
この命令実行中は、他の命令を受け付けなくなりますので注意してください。たとえば、非常に長い時間を指定した場合は、それが終了するまでは他の動作ができません。
動作中は、この命令自体も受け付けないので、この命令で複数一斉に点滅するのはできません。命令30までを使ってプログラムで実現してください。
<送信データ例>
ID=140のボードのポート6をスムーズにONさせる場合。
[255] [140] [2] [61] [6]
【命令90:PWM周期設定】
<説明>
PWM周期は起動時には約1mSに設定されています。周期を変えたい場合はこの命令を実行します。尚、設定した周期は電源を切ると消え、次に起動したときには1mSに戻ります。
PWM命令実行中にこの命令を実行すると、PWM波形が変わりますので、PWM実行前にこの命令を行ってください。
設定が少々わかりづらいので、よくわからない場合は、この命令は使用しないで下さい。
<送信フォーマット>
[255] [ID] [長(4)] [命令(90)] [プリスケーラ][周期上位] [周期下位]
・シンクロバイトは255で固定です。(データを送信する先頭は必ず255)
・IDはハンダジャンパで設定したIDを指定します。
・バイト長は4で固定です。
・命令は90で固定です。
・次にプリスケーラ値を指定します。(0〜3)
・次の2バイトで周期を設定します。(0xFFにはならないように調整してください。)
<プリスケーラと周期設定値>
起動時にはプリスケーラ=2、周期=230に設定されています。
内部で1秒間に14,740,000回(14.74MHz)カウントする基本カウンタが動いています。プリスケーラは、PWM周期設定用にこの基本カウンタを下記のように分周します。
プリスケーラ値0:分周なし(14,740,000回/秒)
プリスケーラ値1:1/8(1,842,500回/秒)
プリスケーラ値2:1/64(230,312.5回/秒)
プリスケーラ値3:1/256(57,578.125回/秒)
値は、周期を表します。2バイトで表せるので設定できる値は0〜65535(2バイト)までの数値となります。値上位・値下位と値の関係は次のようになります。
値=(値上位x256)+値下位
値から値上位と値下位を計算するには次のようになります。
値上位=値を256で割った商
値下位=値を256で割った余り
例えば、プリスケーラ値を3、つまり1/256に設定した場合、一秒間に約57578回カウントされるので、値を57,578に設定するとPWM周期は約1S(1秒)になります。
例えば、プリスケーラ値を0、つまり1/1に設定した場合、一秒間に14,740,000回、1/1000秒間つまり1mSで14,740回カウントされるので値を14740にするとPWM周期は1mSとなります。
設定値が2バイトで表される上限の65535を超えないようにプリスケーラ値を選択することになります。
<送信データ例>
ID=140のボードのPWM周期を0.5mSにする場合(初期設定の230を半分にすれば0.5mS)。
[255] [140] [4] [90] [2] [0] [115]
|
<使い方事例、サンプルプログラム>
AGB65シリーズとマイコンの接続はみな同じです。又、プログラムもほとんど同じになりますので、各種コンピュータとの接続は下記リンクを参照願います。
■PCでAGB65−DOを制御 −> こちらとほぼ同じです。
■BASICスタンプからAGB65−DOを制御−>こちらとほぼ同じです。
■H8からDOを制御−>こちらとほぼ同じです。
■PICからDOを制御−>こちらとほぼ同じです。
■AVRからDOを制御−>こちらとほぼ同じです。
<トラブルシューティングQ&A>
Q:模型店で売っている小型モータ(マブチモータなど)は動かせるか?
A:本製品のポートの出力は数mA〜20mAしか出せませんので、モータなどの大電流装置の駆動はできません。ドライバ回路(Hブリッジ回路)などを間に入れてください。尚、一般的なDCモータ駆動ボードを2011年春にリリース予定ですので、そちらを検討願います。
Q:LEDを点灯させたいが、方法がわからない。
A:LEDの点灯については、インターネットに情報が沢山出ていますので、グーグルなどで検索してみてください。
Q:許容電流値は?
A:1ポート20mA、全ポートあわせると40mAになります。シンク、ソースどちらも同じです。LEDなど駆動する場合、2,3個なら問題ありませんが、8個全部つける場合は、LED駆動回路を別途構築してください。
Q:自作回路につないでいるがまったく動かない。正常に動作しているか確認したい。
A:本製品は電源入り時にLEDが3回点滅します。これが確認できれば正常に動いていますので自作回路の方を重点的に確認してください。
この確認の時は電源以外のケーブルはつながないで下さい。
Q:マイコンと接続し、命令を送ったが返答が無い。
A:下記が考えられます。
・マイコンとGNDを接続していない。
・こちらのTXとマイコンのTXをつないでいる。(TXはマイコンのRXへ、RSCのRXはマイコンのTXへつなぎます。接続例の図を参照。)
・電源電圧が不足(バッテリなどの表示値ではなく、テスタで実際に測って確認して下さい)
・マスタ側の通信速度とこちら側の通信速度が合っていない(マイコンで115kbps通信の場合は特に注意)
・データを数値データ(バイナリデータ)ではなく、キャラクタデータで送っている。
・マスタ側から送信する際のIDが間違っている。
・起動し終わる前にデータを送ると、マスタ間の通信ができなくなる場合があります。電源起動後はしばらく(1秒程度)経過してからデータを送り始めるようにしてください。
・通信中に、こちら側の電源を切ると、その後にこちら側の電源を入れてもマスタとの通信が出来ない場合があります。この場合は一度マスタと本製品両方の電源を切り、こちら側を先に立ち上げてからマスタ側を立ち上げてください(マイコンがマスタの場合は電源を共通で使用していると思いますので、ソフト的に電源投入後しばらくしてからデータを送るようにプログラムしておけば、単純に電源を切り入りするだけで済みます)。
Q:LED3回点滅がしっぱなしになり、動かない。
A:基板への電源電圧が不足しています。基板への電源は定格以上を加えてください。
<使用上の注意>
・このボードは電子機器です。取扱い、輸送時には静電気対策を行ってください。ICの足や、各ピンを直接手で触ったりすると静電破壊される場合があります。
・バッテリ使用時には電源ラインをショートさせると、バッテリが破裂・発火する可能性があります。作業中にはショートさせないよう十分注意して下さい。また、取り付け後も、あいている電源ラインに導電物質が触らないように注意して下さい。
|
