<概要>
■RCサーボコントローラが新しくなりました!!
AGB65−RSC2は、旧製品であるAGG65−RSCの後継機です。ユーザーからの声により機能の変更、コストダウンを行いました。変更点は以下の通り。
1)電源ON直後はサーボが脱力するように変更しました。
2)RedVirsionの対応をやめました。
3)パーツ見直し、RedVirsion非対応によりコストダウンを実現しました。
4)寸法は縦方向に1cm大きくなりました。
■1つで12個のRCサーボを駆動!!
AGB65−RSC2 (Rc Servo Controler) は12個のRCサーボの回転位置と速度を1つのシリアルラインで制御できるコントローラです(以下「コントローラ」と言う)。
■他のAGR65シリーズに接続可能!!
他のAGB65シリーズのセンサやコントローラと同じシリアルラインを共有できます。AGB65シリーズについては「ロボット神経システムAGB65シリーズの説明」のページを参照願います。
■ID変更により4つまでのRSC2を1つのシリアルラインで駆動可能!
DIPスイッチにより、コントローラのIDを4種類に変更でき、同じシリアルラインに4つのAGB65−RSC2を配置、つまり同じシリアルラインで4x12=48個のRCサーボを駆動できます。
■サーボへのスピード指定が可能!!
各サーボへのスピード指定ができます。これはスピードの値を指定するのではなく、「指定した位置に止まるまでの時間を指定」します。このようにすると、歩行ロボットの作成時などで、各関節の回転量が違っても動作終了時間を合わせることが出来、モーションパターンを再生して動かすときに便利です。
また、サーボをゆっくり動かす場合でも、動作開始時にデータを送るだけであとはコントローラがサーボを自動的にゆっくり動かすので、マスタ側(コントローラにつなぐマイコンやPC)はサーボが回転し終える前でも他の計算などができます。
■115200bps、460800bpsの高速通信が可能!
通信速度は115Kbpsにも対応し、PCなどから高速にデータを送信することが出来ます。(通常は9600bps)
また、460800bpsで出荷するバージョンもあります(ご注文時に選択)。460800bps仕様の場合、浅草ギ研のBluetoothモジュールを使ってPCと460Kbpsで通信することが可能になります。
注)ご使用になるマイコンによっては正確な115Kが出ないものがありますので注意してください。クロックの選択は各マイコンのデータシートを参照願います(大抵は115200の倍数のクロックを使う必要があります。)。
■電源搭載で外部に電源回路不要!バッテリ駆動が可能!
ボード上に電源回路を内蔵し、外部に電源回路が不要で、バッテリなどで駆動することができます。 通常は基板用電源とサーボ用電源の2るが必要ですが、サーボ用電源の電圧が7V以上の場合は、基板上のジャンパをさすことによりサーボ電源1つで基板も動かすことができます。
■34x44mmの超小型設計!
ロボットに基板を搭載する場合はその大きさがネックになりますが、RSCは極力小さい部品で構成されており、実装面積が小さくて済みます。また、基板の4角には取り付け穴があり、正方形に配置されていますので、取り付け後に向きを変えてもネジ穴をあけ直す必用がありません。(M2ネジ、30x40mmピッチ四方)
<仕様>
|
基板用電源
|
+7.0〜+25V (*1)
コネクタ:日圧B2B-EH |
|
基板消費電流
|
50mA |
|
サーボ用電源
|
+4.8〜+13V (サーボによる)
コネクタ:日圧B2P-VH |
|
サーボ駆動数
|
最大12個/コントローラ
(1シリアルラインで4コントローラまで) |
|
通信速度
|
9600bps/115.2kbps
(ジャンパピンで設定) 460.8Kbps (注文時に選択) |
|
通信設定
|
8ビット、ノンパリ、ストップ1ビット フロー制御なし
非同期通信 |
|
通信規格
|
TTLレベルEIA232C準拠 (*2)
|
|
固有ID
|
0〜4 DIPスイッチによる設定 (IDについては下記取扱い説明書に詳しく書いてあります。)
|
|
機能
|
●各サーボ位置指定
●各サーボへのスピード指定(指定位置に到達する時間指定)
●各サーボへのパルスを停止 (サーボによっては脱力になる) |
|
サーボ周期
|
15mS |
|
寸法/重量
|
寸法34x44mm 重量:11g |
|
付属品
|
■AGB65電源ケーブルx1 (基板と9V乾電池をつなぐケーブル)
■AGB65通信ケーブルx1 ■サーボ電源コネクタx1
■ジャンパピンx2
(注)サーボ用電源のコネクタが別途必用です。(*3)
|
(*1)高い電圧になるほど効率が落ち、発熱量が増えます。瞬間耐圧30V。
(*2)5V系のマイコンと直結できます。PCと接続する場合は別売のAGB65-232Cが必用になります。3.3V系との接続は下記に説明があります。
(*3)基板側は日圧製B2P-VHコネクタです。このコネクタは製品に添付されていますが、バッテリ側のコネクタはバッテリによりますのでお客様の方でご用意願います。
<ピン配列>

<価格>
税込み 6,300円 (本体価格6,000円)
<オプション>
AGB65−232C 4,725円 (本体価格4,500円)
(PCと接続する場合に必用です。下記接続例を参照。)
Bluetooth無線機(本製品と接続するには下記2つが必要です。)
BlueMaster 12,600円(本体価格12,000円)
AGB65−BT 2,520円(本体価格2,400円)
<接続例>

※複数接続する場合は、消費電流合計以上の出力が出せるバッテリを使用してください。基板用の電源にアルカリ9V乾電池を使用する場合は最高で800mA前後です。ニッカドやニッケル水素はアルカリの5〜10倍ぐらい出力できます。(商品にもよります)
<マイコンとの接続詳細>

<PCとの接続>
PCと接続する場合は、AGB65-232Cに表示されている通りにケーブルを接続します。AGB65-232CにはPCのCOMポートへ接続するためのD-sub9ピンコネクタケーブルが付属していますので、これをPCへ接続します。この結果、上記マイコンとの接続の場合と同様に、PC(マスタ)のTXがコントローラのRXへ、PCのRXがコントローラのTXへ接続されます。

※PCの通信設定は「フロー制御無し、スターとビット1、ノンパリティ」に設定します。フロー制御無しの場合はPCはRTS/CTS信号を無視しますが、念のため、PCケーブル内部でRTS/CTSラインをループしており、これにより間違ってフロー制御=RTS/CTSになった場合、もしくは通信ソフト側でどうしてもRTSコントロールを行ってしまう場合でも、強制的に通信可能状態になります。
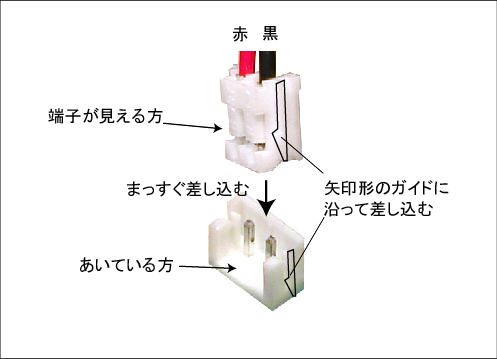
<電源ケーブルの接続>
AGB65電源ケーブルは、なれないと差し込みづらいので、下の図を参照に、慎重に差し込んでください。まっすぐに挿入すると簡単に入ります。簡単に入らない場合は無理をして端子を曲げないように注意して下さい。尚、逆に挿そうとすると入りません。
電源ケーブルの逆側には、9V乾電池用のスナップが付いております。これは簡易的なものなので、何回も乾電池を抜き差しするとスナップ部がゆるみますのでご注意下さい。9V乾電池以外の電源を使用する方は、ケーブルを切断してそれぞれの電源に合ったコネクタを取り付けて下さい。電源ケーブルを切断する際は、電源がつながっていないことを十分注意した上で行ってください。乾電池などが破裂する可能性があります。
RSC Mortion Editor
RSC2用のモーション作成、登録、実行をPC上で作るソフトを作りました。
PCでRSCを動かす方は動作チェックなどにご使用頂けます。尚、このソフトはサンプルプログラムにつき、動作保証はありませんのでご了承下さい。
RSCMortionEditorのページ
<データ形式>
マスタからRSC2への指示は、4〜17バイトの数値データで送られます。バイトサイズ(8ビット)なので、表される数値は0〜255の256種類になります。
尚、以下特に記述がない場合は、数値は10進数で表しています。
−基本形−
データの基本形は次の通りになります。[ ]内は1バイトを表します。()内は送りえる数値の範囲を表します。
[シンクロバイト(255)] [ID(0-3)] [送信バイト数(1-14)] [命令1] [命令2] [命令3] ...
| シンクロバイト |
RSCにデータの通信開始を知らせるデータで、常に「255」で始まります。 |
| ID |
RSCに設定された固有のID。(*) |
| 送信バイト数 |
送信される命令の(バイト)数。シンクロバイト、ID、送信バイト数は数えません。 |
| 命令 |
RSCに動作させたい命令。以下で詳しく説明します。 |
(*)RSCの場合、出荷時のIDは3に設定されています。 |
注)データはキャラクタデータではなく、数値(バイナリ)データで送ります。
例えばマイコンをマスタとし、C言語でプログラムを作る場合に255を送信しようとして(PCや他の言語も考え方は同じ)、
printf("255");
とするのは間違いです。これですとキャラクタデータですので実際には2と5と5を表す3バイトのキャラクタデータが送られてしまいます。数値データに直すと[32][35][35]が送信され(ASCIIコード参照)、[255]ではないことになります。
unsigned char SINC = 255;
printf("%d",SINC);
で、[255]が1バイトだけ送られます。
※お使いのCコンパイラによっては構文がことなるかもしれません(printf関数がないとか、バイトサイズ変数の宣言はcharではなくintやbyteだとか)のでご注意下さい。
|
|
−命令の説明−
| 命令値 |
動作 |
方向 |
フォーマット |
| 1 |
全サーボ駆動 |
送信 |
[255][ID][長(14)][命令(1)][P0][P1]...[P10][P11][Speed] |
| 2 |
個別サーボ駆動 |
送信 |
[255][ID][長(4)][命令(2)][サーボ番号][サーボ位置][Speed] |
| 3 |
全サーボパルス停止 |
送信 |
[255][ID][長(1)][命令(3)] |
| 4 |
指定サーボパルス停止 |
送信 |
[255][ID][長(2)][命令(4)][サーボ番号] |
| 5 |
180°モード |
送信 |
[255][ID][長(1)][命令(5)] |
| 6 |
255解像度モード(default) |
送信 |
[255][ID][長(1)][命令(6)] |
| 254 |
セルフチェック |
送信 |
[255][ID][長(1)][254] |
| |
|
受信 |
[255][ID][長(1)][254] |
| 上以外 |
無視されます。 |
|
|
※方向はマスタ側から見たデータの通信方向を表します。「送信」はマスタ−>コントローラへ送る命令、「受信」はコントローラ−>マスタへ返される結果を表します。
<フォーマットの説明>
| P0,P1...P11 |
各サーボの位置を表します。 |
| サーボ番号 |
個別のサーボを指定します。0ならP0の位置のサーボ、1ならP1...となります。 |
| サーボ位置 |
各サーボの位置を表します。 |
| Speed |
回転し終えるまでの時間を設定します。値1は15mS(サーボパルス1周期)に相当します。 |
<動作の説明>
■180°モード:サーボ位置指定はは0〜254(中心位置127)の255段階で表せる通常モードと、0〜180で表す180°モード(中心位置90)があります。通常モードは解像度が高く、180°モードは計算歩行時に値を計算しやすくなります。
■命令2,3のサーボへの信号パルス停止は、サーボによっては脱力状態になります。(使用するサーボの特性を確認してください。)
■セルフチェック:コントローラが動いているか、又は接続されているかを確認します。 |
|
<使い方事例、サンプルプログラム>
※これらは旧製品(AGB65-RSC)での製作記事ですが、RSC2も同じプログラムで動きます。
■RSCモーションエディター
■PCからRCサーボコントローラAGB65−RSCを動かす
■無線でPCと接続する
■BASICスタンプからAGB65−RSCを動かす
■H8からAGB65−RSCを動かす
■PICからAGB65−RSCを動かす
■AVRからAGB65−RSCを動かす
<Q&A>
Q:RCサーボとは?
A:ラジコン模型用のモータで、サーボの信号線に特定のパルスを加え続けると指定した位置に止まるものです。詳しくはこちらを見てください。
Q:RCサーボはどのメーカーのものが使えるか?
A:この製品は一般的なRCサーボに対応したものです。アナログサーボの場合はほぼ同じ規格なのでどのメーカーのものでも使用できますが線の配置が、[信号線][電源+][電源GND]の順番になっているか確認してください。
ほとんどのサーボはこの配置ですが、中には電源の+とGNDが逆のものもあります。真ん中の線の色が赤なら問題ありません。デジタルサーボの場合は回転角度などがメーカーにより違いますので一概にはいえませんが、ほとんどのサーボは問題なく動かせます。
Q:許容電流値は?
A:サーボ用コネクタの許容値が1つで7Aまでとなっています。サーボは1つにより最大500mA〜2Aほど電流を必要とします。電流値が大きいサーボを沢山同時に動かす場合は2つのコネクタにバッテリをつなぐなどしてください。
Q:模型店で売っている小型モータ(マブチモータなど)は動かせるか?
A:RCサーボはモータ以外にも電子回路などいろいろな部品が入っております。RSC2で小型モータを直接動かすことはできません。浅草ギ研将来的に、このような小型DCモータのコントローラを発売する可能性はあります。
<トラブルシューティング>
Q:自作回路につないでいるがまったく動かない。RSC2が正常に動作しているか確認したい。
A:RSC2は電源入り時にLEDが3回点滅します。これが確認できればRSCは正常に動いていますので自作回路の方を重点的に確認してください。
この確認の時は電源以外のケーブルはつながないで下さい。
A:旧製品(RSC)と、RSC2は起動時の処理が違います。RSCは起動直後から中心位置にサーボを回転させるパルスを出しますが、RSC2は、各サーボの駆動命令を発行するまではサーボを動かしません。
Q:マイコンと接続し、命令を送ったが返答が無い。
A:下記が考えられます。
・マイコンとRSC2間でGNDを接続していない。
・RSC2のTXとマイコンのTXをつないでいる。(RSCのTXはマイコンのRXへ、RSCのRXはマイコンのTXへつなぎます。接続例の図を参照。)
・電源電圧が不足(バッテリなどの表示値ではなく、テスタで実際に測って確認して下さい)
・マスタ側の通信速度とRSC2側の通信速度が合っていない(マイコンで115kbps通信の場合は特に注意)
・データを数値データ(バイナリデータ)ではなく、キャラクタデータで送っている。
・マスタ側から送信する際のIDが間違っている。(RSCは出荷時の設定が”3”です。ご注意下さい。)
・RSCが起動し終わる前にデータを送ると、マスタ間の通信ができなくなる場合があります。電源起動後はしばらく(1秒程度)経過してからデータを送り始めるようにしてください。
・通信中に、RSC側の電源を切ると、その後にRSCの電源を入れてもRSCとマスタ間の通信が出来ない場合があります。この場合は一度マスタとRSC両方の電源を切り、RSC側を先に立ち上げてからマスタ側を立ち上げてください(マイコンがマスタの場合は電源を共通で使用していると思いますので、ソフト的に電源投入後しばらくしてからデータを送るようにプログラムしておけば、単純に電源を切り入りするだけで済みます)。
Q:サーボが変な動きをする、どんな命令を送っても同じように動く、ビクっと動いて中心に戻る、など(1つだけだときちんと動く)
A:サーボ用電源の出力不足です。RCサーボ用のバッテリ(ニッカド、ニッケル水素など)を使用してください。コンビニなどで売っているアルカリ電池やマンガン電池はRCサーボを動かすことはできません(もし駆動できても1つ)。
また、バッテリの配線を自作している場合は、線の太さにも注意して下さい。 十分な太さが無いとサーボに大きな電流が供給できません。流せる電流については線を購入するところで聞いてください。RSC上のコネクタと回路パターンは瞬間で7〜10Aまで流すことができます。
Q:LED3回点滅がしっぱなしになり、動かない。
A:基板への電源電圧が不足しています。基板への電源は7V以上を加えてください。
Q:コントローラの電源を入れてないときに、サーボの電源を入れるとサーボが一方方向に少し動く
A:これはサーボの特性で正常です。大抵のサーボは、電源投入時のノイズを信号と受け取って少し動いてしまいます。
Q:180度回転するはずのサーボなのに、位置指定を0や254のようにしてもプラスマイナス90度(合計180度)まで回らない。
A:RSC2にデータを送った後すぐにまたデータを送るようなプログラムですと、このような状態になる場合があります。データを送る間隔を空けてみてください。
<使用上の注意>
・RCサーボの中には非常にパワーのあるものもあります。RSC電源投入時はサーボを中心位置に動かすパルスが出ていますので、電源を入れたときにサーボが急に回転してケガをしないように十分ご注意願います。
・RCサーボを駆動するバッテリは高い電流を出力できますので、ショートなどすると破裂や発火することがあります。実際にロボットコンテストなどでよく発火を見ますので十分注意して配線作業などを行ってください。特にリチウムポリマーバッテリは取扱いに注意して下さい。電源線の切断・加工時には電源が外れていることをよく確認してください。RSC基板、特にサーボをさしていないピンには電気が流れる部品が接触しないように十分注意して取り付けてください。
・このボードは電子機器です。取扱い、輸送時には静電気対策を行ってください。ICの足や、各ピンを直接手で触ったりすると静電破壊される場合があります。
・バッテリ使用時には電源ラインをショートさせると、バッテリが破裂・発火する可能性があります。作業中にはショートさせないよう十分注意して下さい。また、取り付け後も、あいている電源ラインに導電物質が触らないように注意して下さい。
|
