|
���T�v��
�@�����ł͐M�������{�b�g�_�o�V�X�e����WiMaster�o�R��iPhone�[���ɂȂ��ł݂܂��B
�@ ���{�b�g�_�o�V�X�e���͐M���Ő����̔����Ă���T�[�{�R���g���[����Z���T�[���̓{�[�h�Q�ŁA�P�̃V���A���ʐM�o�H�ɂ��낢��ȋ@�\�𐔎�i���ジ�j�Ȃ��ɂł��A��R�̋@�\��g�ݍ��킹����A���R�Ɋg�������肷����̂ŁA���샍�{�b�g�̍쐬�ȂǂɌ����Ă��܂��B
�@Xcode(4.6.3)��ō쐬����iPhone4(6.1.3)��Object-C�A�v�������k�������̂�������ɂȂ�܂��B
�@WiMaster_test3
�����Ӂ�
�@�����ł��Љ��v���O�����͂����܂ł��T���v���v���O�����ƂȂ�܂��B�ʂ̂�����Ȃǂɂ͂������ł��܂���̂ł������������B
�@�@���OS�̃o�[�W�����Ⴂ����̈Ⴂ�Ȃǂɂ�蓮�삵�Ȃ��\��������܂��B�܂��A�����iPhone��OS�o�[�W�����A�b�v�Ȃǂɑ��Ă̓�����肩�ł͂���܂���B
�Љ��
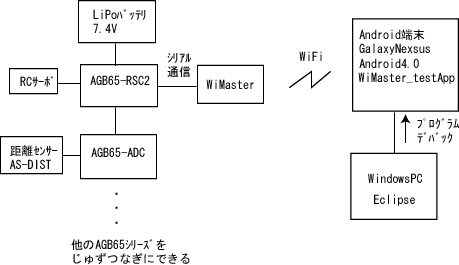
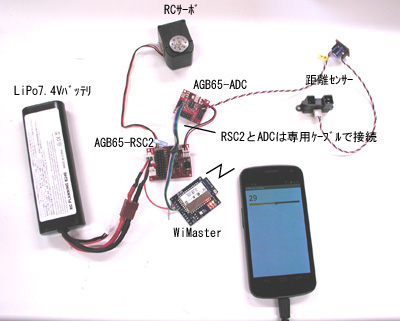
���u���b�N�}��
�@�ȉ��A�u���b�N�}�ƃV�X�e���T�v�ł��B�摜��Android�[���̐}�Ǝʐ^�����̂܂ܗ��p���Ă��܂����A�[����iPhone�ɕς�邾���ŁA�\���͓����ł��BPC��MAC�ŁA�J������Xcode4.6.3�AARC�i�v���W�F�N�g�쐬����ARC�g�p�Ƀ`�F�b�N�j�g�p�ł��B�iAndroid�̗�͂������j
�@�@ |
�@�@
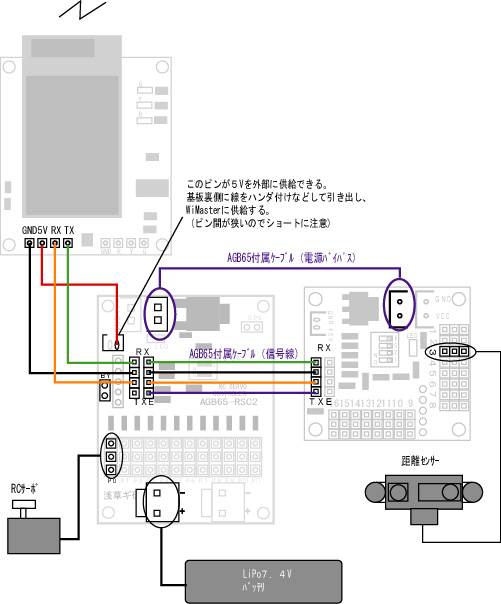
���ڑ��}��
�@�@
���v���O����������
�@�����ł́AiPhone�[����WiMaster�͂��łɃA�\�V�G�[�V�����܂ōς�ł���Ƃ��܂��B���̑���ɂ��Ă�WiMaster�̐����y�[�W�́�����������̕������Q�Ɗ肢�܂��B
�@�ʐM��Socket�ʐM�ōs���܂��B
�@
�@���̃y�[�W�̖`���ɁAXcode�̃v���W�F�N�g�t�@�C��������̂Ń_�E�����[�h���ĉ��Ă��������B
�@��ʃC���[�W
�@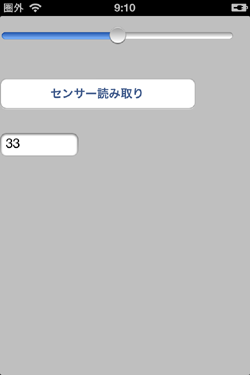
�@�X���C�_�����ƃT�[�{�������A�u�Z���T�[�ǂݎ��v�{�^���������Ɓ��R�̃Z���T�[�̒l���e�L�X�g�t�B�[���h�ɕ\�����܂��B
�@�ȉ��A�v���O�����̐��������܂��BARC���g�p���Ă��܂��B
�@���̃v���W�F�N�g�͎��̂R�̃N���X�ō\������Ă��܂��B
�@
�@�P�jAppDelegate�@�F�v���W�F�N�g�쐬���Ɏ����ō����B�i�������������܂��B�j
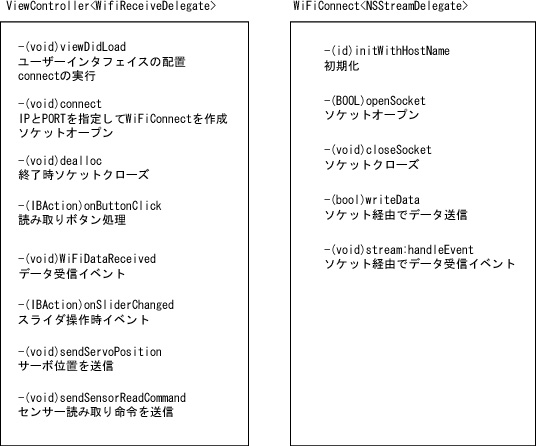
�@�Q�jViewController�@�F��ʑ����\��
�@�R�jWiFiConnect�@�FWiMaster�Ƃ̒ʐM�֘A
�@
�@ViewController��WiFiConnect�̍\���͎��̂悤�ɂȂ�܂��B
�@
�@
�@�T�[�{�����Ƃ��̓\�P�b�g��ʂ��ăR�}���h�̃o�C�g��𑗂�܂��B
�@�Z���T�[����Ԃ��Ă����f�[�^��WiFiConnect�Ŏ܂����A�����ViewController�̃e�L�X�g�t�B�[���h�ɕ\�������邽�߂ɁA<WiFiReceiveDelegate>�Ƃ����f���Q�[�g��p�ӂ��܂����BWiFiConnect���Ńv���g�R���錾���AViewController���Ŏ������܂��B�ڂ����͌�قǐ������܂��B
�@
�@���N���`�\�P�b�g�ڑ��܂�
�@�N������ƁA�܂�ViewController��ViewDidLoad���Ăяo����A�X���C�_�Ȃǂ̃��[�U�[�C���^�[�t�F�C�X��z�u���AWiFiConnect�N���X�����̉����ă\�P�b�g���J�ʂ����Ă��܂��B
�@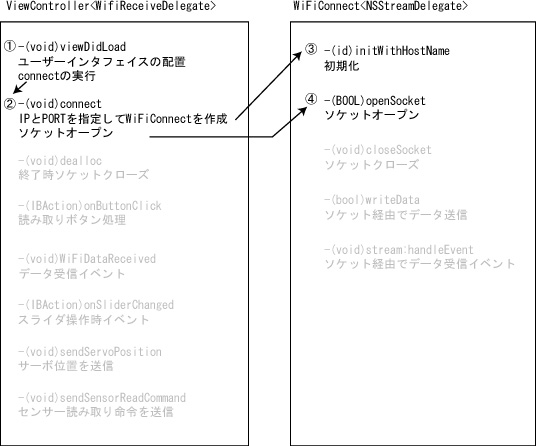
�@���[�U�[�C���^�[�t�F�C�X�̔z�u�Ȃǂ͈�ʓI�Ȏ����ł��̂Ő������������܂��B���̕����̓\�[�X���Q�Ɗ肢�܂��B
�@ �A�̕�������������܂��BViewController�̋N������connect���\�b�h���Ăяo���Ă��܂��B���̕����͎��̂悤�ɂȂ��Ă��܂��B
//////////////////////////////////////////////////////////////
// WiMaster�Ɛڑ�
//////////////////////////////////////////////////////////////
-(void)connect
{
�@_conn = [[WiFiConnect alloc] initWithHostName:@"n.n.n.n"
port:NNNN timeout:30];
�@_conn.delegate = self; //��M�C�x���g���ׁ̈A�f���Q�[�g���Z�b�g
�@�@if([_conn openSocket]){
�@�@�@NSLog(@"openSocket success");
�@�@}else{
�@�@�@NSLog(@"openSocket Error");
�@�@}
}
�@n.n.n.n�̕����ɂ�IP�A�h���X���ANNNN�̕����ɂ̓|�[�g�ԍ�������܂��BIP�A�h���X�ƃ|�[�g�ԍ���WiMaster�w�����ɓY�t����鎆�Ɉ������Ă��܂��̂ŁA���̒l���L�����܂��B�����ł�WiFiConnect�N���X�����̉����A_conn���쐬���Ă��܂��B
�@���ۂ�Socket�ڑ����镔����WiFiConnect���ɂȂ�܂��B
�@
�@�BWiFiConnect�̃R���X�g���N�^�ł�IP��PORT�ԍ��������ɁA���������s���܂��B
//////////////////////////////////////////////////////////////
// �R���X�g���N�^
//////////////////////////////////////////////////////////////
-(id)initWithHostName:(NSString *)hostName port:(UInt32)port
timeout:(int)timeoutSec{
�@self = [super init];
�@if(self){
�@�@ _hostName = hostNam;
�@�@_port = port;
�@�@_readStream = nil;
�@�@_writeStream = nil;
�@}
�@return self;
}
�@
�@����Socket���J�������ł��B
�@�CiPhone�Ń\�P�b�g�ʐM��������@�͂���������炵���̂ł����A�����NSStream���g���Ă��܂��BiPhone��WiFi�@�\��NSStream�͒��ڐڑ����邱�Ƃ��ł��Ȃ��̂ŁACoreFoundation�̃N���X��Socket���������ɁANSStream��__bridge_transfer�œn���Ă��܂��Btransfer�Ȃ̂�CFStream��NSStream�ɓn������Ɂi���Ԃ�H�j���ł��܂��B
//////////////////////////////////////////////////////////////
// �\�P�b�g�I�[�v��
//////////////////////////////////////////////////////////////
-(BOOL)openSocket
{
�@//CFStream�ŊJ���āANSStream�ɓn��
�@CFReadStreamRef readStream;
�@CFWriteStreamRef writeStream;
�@CFStreamCreatePairWithSocketToHost(kCFAllocatorDefault, (__bridge
CFStringRef)_hostName, _port, &readStream,&writeStream);
�@_readStream = (__bridge_transfer NSInputStream*)readStream;
�@_readStream.delegate = self;
�@[_readStream scheduleInRunLoop:[NSRunLoop mainRunLoop] forMode:NSDefaultRunLoopMode];
�@_writeStream = (__bridge_transfer NSOutputStream*)writeStream;
�@_writeStream.delegate = self;
�@[_writeStream scheduleInRunLoop:[NSRunLoop mainRunLoop] forMode:NSDefaultRunLoopMode];
�@[_readStream open];
�@[_writeStream open];
�@return YES;
}
�@Socket���J������A���̓X�g���[���E�o�̓X�g���[�����ꂼ���RunLoop�i�C�x���g���������邽�߂ɗ��œ����Ă��郋�[�v�j�ɓo�^���āA���ꂼ����I�[�v�����܂��B�����Socket�ʐM�̏������ł��܂����B���̌�AWiMaster�̗�LED���A�_�ł���_���i�����ςȂ��j�ɕς��܂��B
�@
�@
�@
�@���f�[�^�𑗂��ăT�[�{����
�@��ʂ̃X���C�_�����ƁA�T�[�{�������܂��B
�@
�@
�@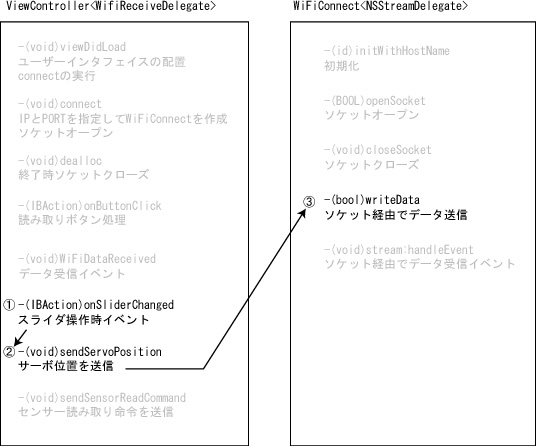
�@�@�X���C�_�����ƁAonSliderChange�C�x���g�����s����܂��B���̒��ŇAsendServoPosition�����s���ăT�[�{�R���g���[���֖��߂𑗂��Ă��܂��B
�@
//////////////////////////////////////////////////////////////
// �T�[�{�ʒu�𑗐M
//////////////////////////////////////////////////////////////
-(void) sendServoPosition:(int)num pos:(float)pos psd:(int)spd
{
�@uint8_t data[10];
�@data[0]=255;�@�@//sync byte
�@data[1]=3; �@�@�@//board id(AGB65-RSC2 default id)
�@data[2]=4; �@�@�@//data length
�@data[3]=2; �@�@�@//com(single servo drive command)
�@data[4]=num; �@//servo number
�@data[5]=pos; �@ //position
�@data[6]=spd; �@ //speed
�@[_conn writeData:data length:7];
}
�@
�@WiFiConnect�̃C���X�^���X�ł���_conn��writeData���\�b�h�ɁA���߂̃o�C�g���n���Ƒ��M����܂��B
�@�B���ۂ�Socket�ʐM�ő��M���Ă���̂�WiFiConnect���ɂȂ�܂��B
�@
//////////////////////////////////////////////////////////////
// �f�[�^���M
//////////////////////////////////////////////////////////////
- (bool)writeData:(const void*)data length:(NSUInteger)len
{
�@BOOL ret = NO;
�@NSInteger leftlen = len;
�@if(leftlen <= 0) return YES;
�@while(TRUE){
�@�@NSStreamStatus stat = _writeStream.streamStatus;
�@�@if(stat == NSStreamStatusOpen || stat == NSStreamStatusWriting){
�@�@�@if([_writeStream hasSpaceAvailable]){
�@�@�@�@NSInteger count = [_writeStream write:(data + (len - leftlen))
maxLength:leftlen];
�@�@�@�@if(count >= 0){
�@�@�@�@�@leftlen -= count;
�@�@�@�@�@if(leftlen <= 0){
�@�@�@�@�@�@ret = YES;
�@�@�@�@�@�@break;
�@�@�@�@�@}
�@�@�@�@}else{
�@�@�@�@�@NSLog(@"writeData error %@",_writeStream.streamError.description);
�@�@�@�@�@break;
�@�@�@�@}
�@�@�@}
�@�@}else{
�@�@�@NSLog(@"writeData error %u",stat);
�@�@�@break;
�@�@}
�@}
�@return ret;
}
�@
�@NSoutputStream�̃C���X�^���X_writeStream��write���\�b�h���g���đ��M���Ă��܂��B
�@
�@
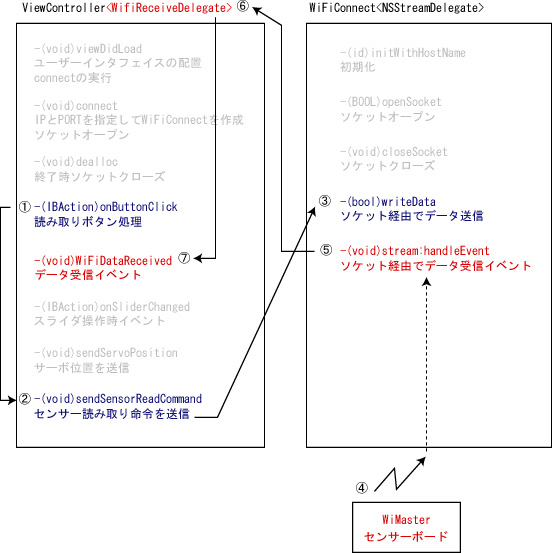
�@���Z���T�[�̃f�[�^����M����
�@�Z���T�[�ǂݎ��{�^���������ƁA�e�L�X�g�t�B�[���h�ɃZ���T�[�̒l���\������܂��B
�@���̗���͑傫���Q�̕�������Ȃ�܂��B
�@
�@�P�jAGB65-ADC(�Z���T�[�{�[�h�j�ɑ��āA�Z���T�[�ǂݎ�薽�߂s
�@�Q�j���ʂ�iPhone�ɕԂ���A�C�x���g������
�@
�@����}�͎��̂悤�ɂȂ�܂��B�@�`�B�܂ł́A�T�[�{���������ƂقƂ�Ǔ����i���߂̃o�C�g�Ⴄ�����j�Ȃ̂Ő������������܂��B
�@�ȉ��A�Ԏ��̕����̇C����������܂��B
�@
�@
�@
�@�C�Z���T�[�{�[�h���Z���T�[�ǂݎ�薽�߂���M����ƁA���ʂ�Ԃ��܂��B���̌��ʂ̃f�[�^���WiMaster���o�R����iPhone�ɓ���A<NSStremaDelegate>�̇Dstream:handleEvent���\�b�h������܂��B
�@
//////////////////////////////////////////////////////////////
// Stream�̃C�x���g
//////////////////////////////////////////////////////////////
-(void)stream:(NSStream*)stream handleEvent:(NSStreamEvent)eventCode
{
�@switch(eventCode){
�@�@case NSStreamEventHasBytesAvailable: //�Ȃɂ���M���Ă�����
�@�@�@if(stream == self.readStream){
�@�@�@�@[self readBuffer];
�@�@�@}
�@�@�@break;
�@�@case NSStreamEventHasSpaceAvailable:
�@�@�@//
�@�@�@break;
�@�@�E
�@�@�E
�@�@�E
�@}
}
�@<NSStremaDelegate>����������ƁA�ʐM���̂��낢��ȃC�x���g���E����悤�ɂȂ�܂��B���̒��ŁANSStreamEventHasBytesAvailable�́A��������M�����Ƃ��ɔ������܂��B���ۂ̓ǂݍ��݂�readBuffer�Ƃ������\�b�h����肻����ŏ������Ă��܂��B
//////////////////////////////////////////////////////////////
// ��M�f�[�^�ǂݍ���
//////////////////////////////////////////////////////////////
-(void)readBuffer
{
�@uint8_t buf[1024];
�@unsigned int length = [self.readStream read:buf maxLength:1024];
�@NSMutableData *data = [[NSMutableData alloc] initWithLength:length];
�@[data appendBytes:buf length:length]; //�����܂ł�data�̒��Ɏ�M�ς݃f�[�^������
�@//ViewController�ɃC�x���g��n��
�@if( [self.delegate respondsToSelector:@selector(WiFiDataReceived:)]
){ //ViewController�Ń��\�b�h�����݂��邩�`�F�b�N
�@�@[self.delegate WiFiDataReceived:data]; //�f���Q�[�g�Ŏ�M�f�[�^��n��
�@}
}
�@��M�f�[�^�́AinputStream�̃C���X�^���X�ł���readStream��reas���\�b�h���g���AMSMutableData�^��data�ɏ�������ł��܂��B
�@�E��M�����f�[�^�́A�Ǝ��ō�����f���Q�[�g�ł���<WiFiReceiveDelegate>���g����ViewController�ɓn����܂��B���̕������n���Ƃ���ł��B
�@[self.delegate WiFiDataReceived:data];
�@���̃C�x���g�͇FWiFiDataReceived�ŏ�������܂��B
�@���̃C�x���g�̃f���Q�[�g<WiFiReceivedDelegate>�́AWiFiConnect�̃w�b�_��@protocol�錾����Ă��܂��B���̕����͎��̂悤�ɂȂ��Ă��܂��B
@protocol WiFiReceivedDelegate<NSObject>
-(void)WiFiDataReceived:(NSMutableData*)data;
@end
@interface WiFiConnect : NSObject<NSStreamDelegate>
�@�@�E
�@�@�E
@property (nonatmic, assign) id<WiFiReceivedDelegate>delegate;
�@�@�E
�@�@�E
@end
�@
�@���̃f���Q�[�g��ʂ��āAWiFiConnect������ViewController��WiFiDataReceived:���Ăяo����܂��B
�@
//////////////////////////////////////////////////////////////
// �f�[�^��M�C�x���g�iWiFiConnect���j
//////////////////////////////////////////////////////////////
-(void)WiFiDataReceived:(NSMutableData *)data{
�@NSLog(@"data=%@",data);
�@//#3�̃Z���T�[�l�ׂ�i�e�X�g��H�ł�#3�ɋ����Z���T�[���Ȃ����Ă���j
�@int result = [self checkSensorValue:data sensorNumber:3];
�@//��ʂɕ\��
�@[_textField setText:[NSString stringWithFormat:@"%d",result]];
}
//�ԐMdata����w��̃T�[�{�ԍ��̌��ʒl��Ԃ�
-(int)checkSensorValue:(NSMutableData *)data sensorNumber:(int)sNum{
�@int result = -1;
�@//MutableData��byte�z��ɕϊ�
�@int len = [data length];
�@Byte rsvData[len];
�@[data getBytes:&rsvData length:len];
�@//�w��ԍ��̃Z���T�[�l�𒊏o�iAGB65-ADC����̕ԐM����́j
�@//�w�b�_����4�o�C�g�Ȃ̂ōŌォ��4��O�܂ł̃f�[�^���m�F
�@for(int i=0; i<len-4; i++){
�@�@//�ԐM�t�H�[�}�b�g [255][ID(120-127)][�o�C�g��(17)][����(1)][P1����][P2����]...[P16����]
�@�@if(rsvData[i]==255 && rsvData[i+1]==120 && rsvData[i+2]==17
&& rsvData[i+3]==1){
�@�@�@result=rsvData[i+3+sNum]; //sNum�Ŏw�肵���T�[�{�ԍ��̌��ʒl
�@�@�@break;
�@�@}
�@}
�@return result;
}
�@�����ł́A�����Ă����f�[�^�̒�����Z���T�[���𒊏o���A�\�������Ă��܂��B
�@��M�f�[�^�́A�Z���T�[�{�[�h���瑗���Ă���f�[�^�������Ǝv���Ă��܂������A���O������ƁA�Z���T�[�f�[�^�̑O��0x00�̒l�����\���邱�Ƃ��������Ƃ��킩�����̂ŁA�Ƃ肠�����ǂݎ��\�ȃf�[�^��S�Ď��A���̒�����Z���T�[�{�[�h�̃w�b�_���
[255] [120] [17] [1] �̗���m�F���A��������Z���T�[�f�[�^�̈ʒu�ʂ��Ă��܂��B
�@����ŁA�\�P�b�g�ʐM���g����WiMaster�o�R�ŃT�[�{��Z���T�[�������Ƃ��ł��܂��B���{�b�g�_�o�V�X�e���ł�DC���[�^�R���g���[���ȂǁA���낢��ȋ@�\�̃{�[�h������܂����A�����������悤�ɓ��������Ƃ��ł��܂��B
�@
�@���̃T���v���v���O�����ł́A�ȒP�ɐ������邽�߂ɁA�{���͓����ׂ��G���[������������Ȃǂ��s���Ă��܂���B���ۂɎg���ꍇ�͂������Q�l�ɂ��Ď��p�I�ȃv���O����������Ă��������B
�@
�ȏ�
|