偼偠傔偵
丂愺憪僊尋偺惢昳偺拞偵丄嬋偘傞偲掞峈抣偑曄傢傞嬋偘僙儞僒乕偲偄偆傕偺偑偁傝傑偡丅掞峈偵揹棳傪棳偡偲揹埑偑惗偠傑偡偑丄儅僀僐儞偺俙俢僐儞僶乕僞婡擻乮埲屻俙俢俠乯傪巊偊偽揹埑傪應掕偡傞偙偲偑偱偒傑偡偑丄偙傟偵傛傝嬋偘僙儞僒乕偺掞峈抣亖嬋偑傝嬶崌傪應掕偡傞偙偲偑偱偒傑偡丅偙偙偱偼俹俬俠侾俀俥俇俈俆偱嬋偘僙儞僒乕偺掞峈抣傪應掕偡傞曽朄傪徯夘偟傑偡丅
揹埑弌椡宆僙儞僒偺応崌
偙偺儁乕僕偱偼嬋偘僙儞僒偵偮偄偰夝愢偟傑偡偑丄揹埑弌椡宆僙儞僒乕偺僾儘僌儔儉傕傎傏摨偠偱偡丅愙懕偡傞応崌偼揹埑弌椡宆僙儞僒偺怣崋弌椡慄傪俙俶侽偵愙懕偟傑偡丅乮掞峈偵傛傞暘埑偼偟側偄乯
嬋偘僙儞僒乕

嬋偘傞偲掞峈偑侾侽俲兌偐傜俀侽乣俁侽俲兌偖傜偄偵憹偊傞丅偦傟偩偗偱偡丅
嬋偘偺曽岦偼丄幨恀偺柺偺斀懳懁偵嬋偘偨偲偒偟偐曄壔偟傑偣傫偺偱拲堄偟偰偔偩偝偄丅乮憃曽岦偺嬋偘偼俀偮巊偊偽専抦偱偒傞丅乯
掞峈抣傪撉傓偵偼丠
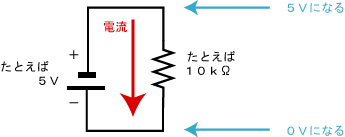
掞峈偵揹棳傪棳偡偲掞峈偺椉抂偵偼揹埑嵎偑惗偠傑偡丅
偙偺掞峈傪俀偮捈楍偵偡傞偲
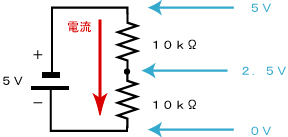
偙偺傛偆偵揹埑偼俀摍暘偝傟傑偡乮揹棳傕尭傝傑偡偑偙偙偱偼揹埑偩偗偵拲栚乯丅偙偺傛偆偵捈楍掞峈偺椉抂揹埑偼揹尮偺揹埑嵎傪堐帩偟傑偡偑丄掞峈偺娫偼暘埑偝傟傑偡丅偙偺暘埑偺搙崌偄偼掞峈抣偵乮傎傏乯斾椺偟傑偡偺偱丄椺偊偽壓偺掞峈傪戝偒偔偡傞偲拞娫揰偺揹埑偼忋偑傝傑偡丅
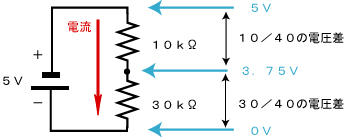
偮傑傝丄偙偺壓偺掞峈傪嬋偘僙儞僒偵抲偒姺偊傞偲丄嬋偑傝嬶崌偵傛偭偰乮偙偺夞楬偺応崌偼乯俀丏俆V乣俁丏俈俆V偖傜偄偺揹埑偑弌椡偝傟傞偙偲偵側傝丄偙偺揰傪PIC偺ADC偱揹埑應掕偡傟偽掞峈抣丄偮傑傝嬋偑傝嬶崌偑應掕偱偒傑偡丅
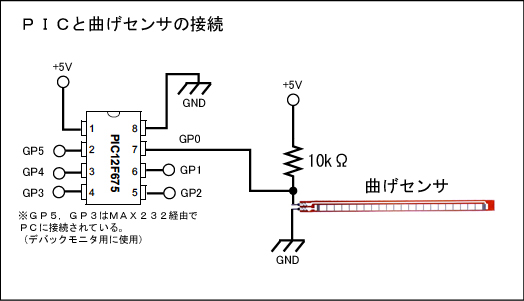
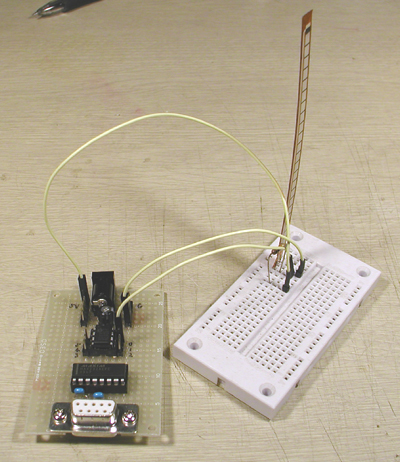
夞楬恾
忋偺夞楬偦偺傑傑偱偡丅應掕億僀儞僩偼GP侽偵偮側偄偱撉傒庢傞偙偲偵偟傑偡丅
偙偺寢壥傕丄俹俠偵憲偭偰昞帵偟傑偡丅
揹尮夞楬側偳偵偮偄偰偼乽俹俬俠傪巊偭偰傒傞乿傪嶲徠婅偄傑偡丅
寢壥偺弌椡乮僨僶僢僋儌僯僞乯偵偮偄偰偼乽俹俬俠偲俹俠偲偺愙懕乿傪嶲徠婅偄傑偡丅
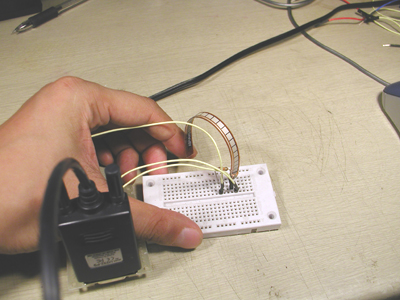
幚嵺偺愙懕偼僽儗僢僪儃乕僪偱峴偄傑偟偨丅
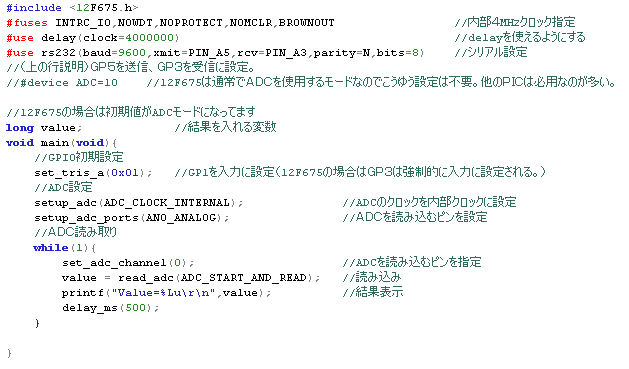
僾儘僌儔儉
崱夞弶偲側傞婡擻偼俙俢俠偱偡丅偙傟傕乽俠尵岅偵傛傞俹俬俠僾儘僌儔儈儞僌擖栧丂屻娬揘栫挊乿偵徻偟偔彂偄偰偁傝傑偡偺偱偦偪傜傕嶲徠偟偰偔偩偝偄丅
僥僉僗僩僨乕僞偼偙偪傜丂PIC-BebdS.trxt
乮塃僋儕僢僋偱曐懚乯
懡偔偺俹俬俠杮偱徯夘偝傟偰偄傞俹俬俠侾俇俥俉係側偳偼昗弨偱俙俢俠婡擻偑僆儞偵側偭偰偄側偄偺偱偡偑丄偙偙偱巊梡偟偰偄傞侾俀俥俇俈俆偼昗弨偑俙俢俠擖椡傪巊梡偡傞傛偆偵側偭偰偄傞偺偱拲堄偟偰偔偩偝偄丅晛捠偼僾儘僌儔儉偺巒傔偺傎偆偱丂#device
ADC=10丂偲擖傟側偄偲偄偗側偄偺偑懡偄偺偱偡偑侾俀俥俇俈俆偼晄梫偱偡丅
偙偺俙俢俠偼侾侽價僢僩偺夝憸搙偱揹埑傪撉傒庢傝傑偡丅偙偺愝掕偑丂俙俢俠亖侾侽丂偲偄偆偲偙傠傜偟偄偱偡丅傛偭偰丄侾侽價僢僩暆偺曄悢偵寢壥傪奿擺偡傞昁梫偑偁傞偺偱
long value;
偺傛偆偵倢倧値倗宆偺曄悢傪梡堄偟偰傑偡丅寢壥弌椡printf( )娭悢偺僼僅乕儅僢僩巜掕巕傕 %u乮晞崋柍偟俉價僢僩悢抣乯丂偱偼側偔丄丂%Lu乮晞崋柍偟侾俇價僢僩悢抣乯偵側傝傑偡丅
偝偰丄倣倎倝値娭悢偺拞偺俙俢俠偺愝掕偲撉傒庢傝偱偡偑丄俠俠俽亅俠偱偼丂setup_adc( ) 側偳偺娭悢偑梡堄偝傟偰偍傝丄屻娬巵偺杮偱徻偟偔愢柧偝傟偰偄傑偡偑丄侾俀俥俇俈俆偺応崌偼堷悢偑曄傢傝傑偡丅偲偄偆偐丄偦傟偧傟偺俹俬俠偱偐側傝僶儕僄乕僔儑儞偑偁傞偺偱偙傟傜偺堷悢偼俹俬俠偛偲偵堘偆偲巚偄傑偡丅傛偭偰丄杮偺捠傝偵愝掕偟偰傕乮杮偲堘偆僶乕僕儑儞偺俹俬俠偩偲乯僐儞僷僀儖僄儔乕偲側傝傑偡丅
偙偺愝掕抣偼偳偆傗偭偰抦傞偐偲偄偆偲丂12F675.h 僿僢僟僼傽僀儖偺拞偵婰弎偝傟偰傑偡丅僿僢僟僼傽僀儖偼僥僉僗僩僼傽僀儖側偺偱儊儌挔側偳偱傕奐偗傑偡偑丄揔摉側僾儘僌儔儉傪嶌偭偰丂#include
<12F675.h> 偑擖偭偰偄傞僼傽僀儖傪僐儞僷僀儖偡傞偲俵俹俴俙俛懁偱僾儘僕僃僋僩偵彑庤偵慻傒崬傫偱偔傟傑偡偺偱偙傟傪僋儕僢僋偟偰傕拞偑尒傟傑偡丅
仸俵俹俴俙俛傗僐儞僷僀儖偵偮偄偰偼乽俹俬俠傪巊偭偰傒傞乿偵彂偄偰偁傝傑偡丅
僐儞僷僀儖偑惉岟偡傞偲偳偙偐傜偐12F675傪尒偮偗偰偒偰僾儘僕僃僋僩偵慻傒崬傫偱偔傟傞丅偙傟傪僟僽儖僋儕僢僋丅
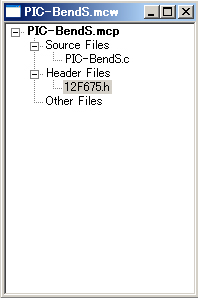
12F675.h偺拞恎丅偁傑傝徻偟偔彂偄偰傑偣傫偑丄戝懱尒傟偽傢偐傝傑偡偹丅
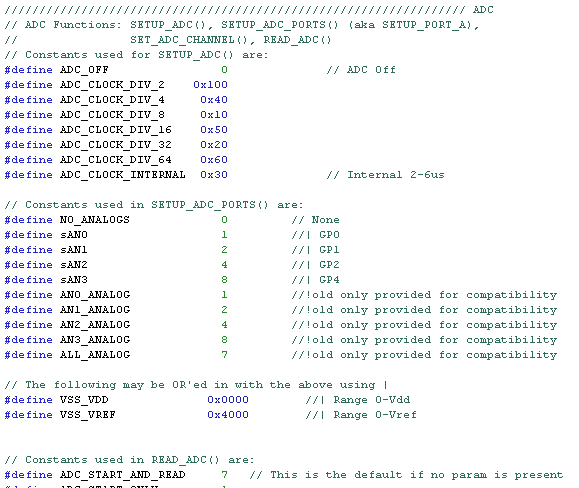
椺偊偽杮側偳偱偼侾俇F俉係傪椺偵庢傝丄ADC億乕僩偺愝掕偼丂setup_adc_ports(RA0);丂偺傛偆偵彂偄偰偁傝傑偡偑丄忋傪尒傞偲
侾俀F675偺丂setup_adc_ports( )丂偺応崌偼 AN0_ANALOG 偺傛偆偵偡傞偙偲偑傢偐傝傑偡乮偲偄偆偐悇應偱偒傑偡丅乯丅
寢壥
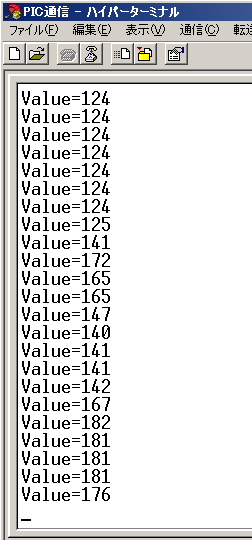
寢壥偼PC偵暥帤傪憲傝丄僴僀僷乕僞乕儈僫儖偱昞帵偟傑偟偨丅
寢壥偺弌椡乮僨僶僢僋儌僯僞乯偵偮偄偰偼乽俹俬俠偲俹俠偲偺愙懕乿傪嶲徠婅偄傑偡丅
嬋偘偰側偄偲偒丅PIC婎斅偵偝偝偭偰偄傞偺偼USB僔儕傾儖傾僟僾僞偱偡丅COM億乕僩偑嬻偄偰側偐偭偨偺偱USB偵愙懕偟偰COM係偐傜僨乕僞傪庢偭偰傑偡丅
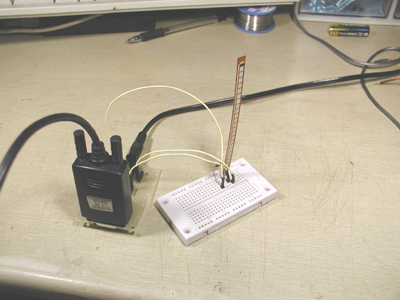
偡偙偟嬋偘偨丅

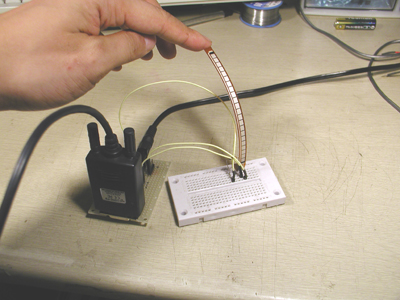
偐側傝嬋偘偨丅

掞峈偺抣傪曄偊傞偲悢抣偑偐傢傝傑偡偺偱偄傠偄傠帋偟偰傒偰偔偩偝偄丅
偙傟偱PIC偱嬋偑傝嬶崌傕應掕偱偒傞傛偆偵側傝傑偟偨丅
偙偺僙儞僒乕寢峔攧傟偰傑偡偑丄傒側偝傫偳偺傛偆側梡搑偱巊偭偰傞偺偱偟傚偆偐乮偲攧偭偰傞杮恖偑尵偆側偲偄偆姶偠傕偁傞偑丅乯
偪側傒偵嵟嬤丄ROBO-ONE偺J僋儔僗側偳偱妶桇乮偲偄偆偐桪彑偲偄偆偐乯偝傟偰偄傞僔儍僀僯儞僌G偺儅僗僞乕僗儗僀僽偺僸僕晹暘偵偼偙偺僙儞僒乕偑巊傢傟偰偄傞偲偺偙偲偱偡丅
俀侽侽俆擭俉寧侾俉擔 |
| 丂 |
|