偼偠傔偵
丂慜偺儁乕僕偱偼丄柍慄婡俼俉侽傪偮偐偭偰俹俠偐傜俙俿亅倂俙俴俲俤俼傪摦偐偡曽朄偵偮偄偰夝愢偟傑偟偨偑丄儔僕僐儞僾儘億偺傛偆側姶偠偱実懷宆偺僐儞僩儘乕儔偑嶌傟傞偲妝偟偦偆偱偡丅偙偙偱偼俙俿亅倂俙俴俲俤偺柍慄僐儞僩儘乕儔傪嶌偭偰傒傑偡丅偣偭偐偔側偺偱僐儞僩儘乕儔傕俙俿倣倕倗倎俁俀偱嶌偭偰傒傑偡乮偙偺儁乕僕偱偼柺搢側偺偱俙俿亅倂俙俴俲俤俼偺僉僢僩偺儅僀僐儞儃乕僪棳梡偟偰傑偡偑丄杮偵彂偄偰偁傞曽朄偱帺嶌傕壜擻偱偡丅乯丅
丂彯丄 偙偙偱巊梡偡傞AT-WALKE偵偮偄偰偼AT-WALKER偺徯夘儁乕僕傪嶲徠婅偄傑偡丅彯丄俙俿亅倂俙俴俲俤俼偺惢嶌丒僾儘僌儔儈儞僌偺婎杮偵偮偄偰偼彂愋乽擇懌曕峴儘儃僢僩惢嶌挻擖栧丗僆乕儉幮乿乮埲壓乽杮乿乯傪嶲徠婅偄傑偡丅
僐儞僩儘乕儔偺嶌惉
丂僴乕僪僂僃傾徻嵶偼
丂仭俼俉侽偲偺愙懕娭楢亅亜乽俙俿亅倂俙俴俲俤傪俹俠偐傜柍慄偱憖廲偡傞乿乽旝庛柍慄儌僕儏乕儖俼俉侽偺徯夘乿
丂仭僗僀僢僠偺敾掕亅亜乽杮乿偺俆亅侾丄僞僢僠僙儞僒乕偺偲偙傠
丂傪嶲徠婅偄傑偡丅杮傪堦捠傝傗偭偨曽偼偦傫側偵擄偟偔側偄偐偲巚偄傑偡丅
丂俙俿亅倂俙俴俲俤俼儅僀僐儞儃乕僪乮埲壓儅僀僐儞儃乕僪乯偲偦傟偧傟偺愙懕偼崱夞丄壓婰偺捠傝偵偟傑偟偨丅
丂俼俉侽偺俿倃丂丗丂儅僀僐儞儃乕僪偺俿倃乮俹俢侾乯
丂俼俉侽偺俼俿俽丂丗丂俹俛俇
丂僾僢僔儏僗僀僢僠倶俉屄丂丗丂俹俙侽乣俹俙俈
丂丂僾僢僔儏僗僀僢僠俉屄傪億乕僩俙偵愙懕偟偰偍傝丄億乕僩俙傪堦夞撉傔偽奺僉乕偺忬懺偑慡晹傢偐傞偲偄偆傕偺偱偡丅乮俉屄偺僉乕偑奺價僢僩偵懳墳偟偰偄傞乯
丂 夞楬恾偼妱垽偟傑偡丅偦偺懠丄揹尮傗俧俶俢側偳丄摉慠攝慄偟偰傑偡丅僗僀僢僠偲ATmega32偺愙懕偼杮偵徻偟偔彂偄偰傑偡乮俆復乯丅柍慄娭學偼懠偺儁乕僕傪尒偰偔偩偝偄丅
丂幚嵺偵嶌惉偟偨傕偺偼壓偺幨恀偺傛偆偵側傝傑偟偨丅
丂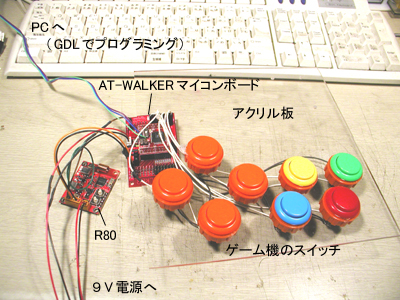
丂僎乕儉僗僀僢僠乮埲壓僉乕乯偼丄捠忢偼侾K兌掞峈偱俆V偵僾儖傾僢僾偝傟偰偍傝丄僗僀僢僠傪墴偡偲GND偵摫捠偡傞傛偆偵側偭偰偄傑偡丅偮傑傝丄捠忢偼乽侾乿偱僉乕傪墴偡偲乽侽乿偑擖椡偝傟傑偡丅偙偺僗僀僢僠偼愮愇揹彜偱攧偭偰傑偡丅寢峔埨偐偭偨丅
丂R80傪憲怣偵偡傞偵偼RTS抂巕傪High偵偟傑偡丅崱夞丄偙偪傜偺僐儞僩儘乕儔懁偼忢偵憲怣側偺偱RTS傪掞峈宱桼偱High偵僾儖傾僢僾偱傕傛偐偭偨偺偱偡偑丄憲怣枅偵LED偑岝傞偲僇僢僠儑偄偄偺偱俹俛俇僺儞偱傢偞傢偞俼俿俽僐儞僩儘乕儖傪偡傞偙偲偵偟傑偡丅亅亜偲巚偄傑偟偨偑丄屻偱幚尡偟偰傒傞偲俼俿俽愗懼屻偺侾僶僀僩偑偙偗傞偺偱捠怣偱偒偢丅傛偭偰俼俿俽偼忢偵俫倝倗倛偵偟偰傑偡丅俼俿俽偼俹俛俇偱偼側偔僾儖傾僢僾偟偰傕摨偠偱偡丅偙偺傛偆側応崌偼晛捠偼僜僼僩揑偵夝寛偟傑偡偑丄崱夞偼娙扨偵嵪傑偣偨丅
丂傑偢丄柍慄柍偟偱丄僉乕偺抣偑庢摼偱偒偰偄傞偐傪妋擣偡傞僾儘僌儔儉傪嶌傝傑偟偨丅僉乕偼俹俙侽亅俹俙俈丄偮傑傝摨偠億乕僩偵偮側偑偭偰傑偡偺偱億乕僩俙偺抣傪偦偺傑傑弌椡偡傟偽偳偺僉乕偑墴偝傟偨偐傢偐傝傑偡丅僗僀僢僠偼墴偡偲乽侽乿偱晧榑棟側偺偱丄寢壥傪乽侾侾侾侾侾侾侾侾乿偲倃俷俼偟丄價僢僩扨埵偱斀揮偝偣偰惓榑棟偵偟傑偡丅
XOR偺恀棟抣昞
| 尦偺悢 |
墘嶼偡傞悢 |
寢壥 |
| 侽 |
侽 |
侽 |
| 侽 |
侾 |
侾 |
| 侾 |
侽 |
侾 |
| 侾 |
侾 |
侽 |
墘嶼偡傞悢偼乽侾乿偱屌掕側偺偱丄尦偺悢(價僢僩乯偑侽側傜侾丄侾側傜侽偵側傞丅
倃俷俼偺俠尵岅偺婰崋偼丱偱偡丅乮僇僞僇僫偺乽傊乿偺僉乕乯
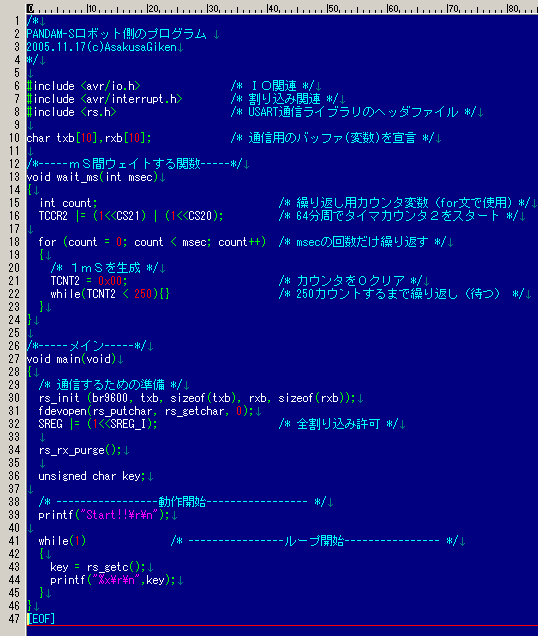
僾儘僌儔儉偼師偺捠傝丅
丂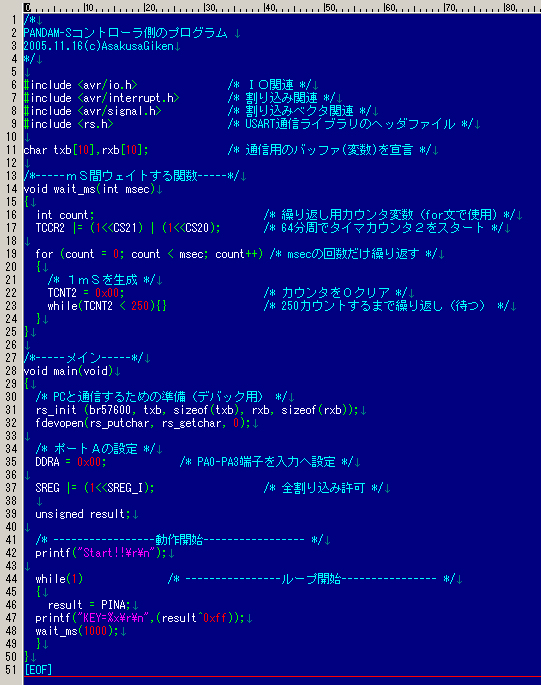
丂仸彂偄偰偄傞搑拞側偺偱晄梫側僐乕僪傕擖偭偰傑偡丅
丂仸result偺曄悢愰尵偑娫堘偭偰傑偡偹丅偱傕曄悢偑嶌傜傟偰傞傛偆偱偡丅
丂杮傪僋儕傾偟偰丄俼俠僒乕儃偺嬱摦傕儅僗僞乕偟偰偄傞忬懺側傜偽擄偟偄偲偙傠偼柍偄偲巚偄傑偡丅
丂僉乕偼億乕僩俙偵師偺傛偆偵愙懕偟偰偄傑偡丅
丂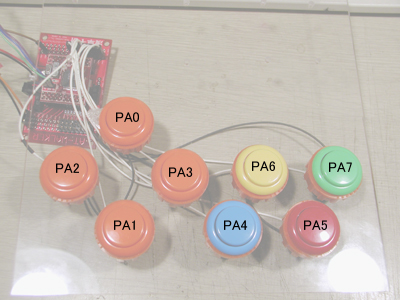
丂寢壥偼師偺捠傝
丂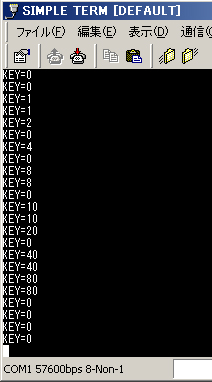
丂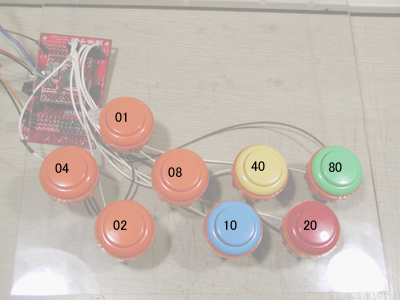
丂奺僉乕傪墴偡偲忋偺幨恀偺斣崋偑寢壥偲偟偰摼傜傟傑偡丅
丂偙偺宍幃偺僉乕擖椡偱桪傟偰偄傞偺偼丄暋悢偺僉乕傪慻傒崌傢偣傞偙偲傕偱偒傞偲偄偆偙偲偱偡丅偮傑傝偙偺俉僐偺僉乕亖俉價僢僩偱俀俆俇捠傝偺僐儅儞僪偑擖椡偱偒傞偲偄偆偙偲偱偡丅侾偮偺僉乕偑侾價僢僩偵懳墳偟偰偄傞傢偗偱偡偹丅
丂僆儗儞僕忋偲壓傪摨帪偵墴偡偲侽倶侽俁偑丄椢偲墿怓傪摨帪偵墴偡偲侽倶俠侽偑丏丏丏偲偄偆嬶崌偵側傝傑偡丅傑偁丄幚嵺偵偼俀俆俇捠傝傕儌乕僔儑儞傪嶌傞偺偼偟傫偳偄偺偱偩傟傕傗傜側偄偲巚偄傑偡偑丅丅
丂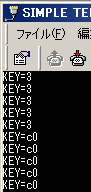
丂僉乕擖椡偑妋擣偱偒傑偟偨偺偱丄TX僺儞乮PD1乯傪捠偟偰俼俉侽偵僨乕僞傪憲傞僾儘僌儔儉偑師偺傛偆偵側傝傑偟偨丅
丂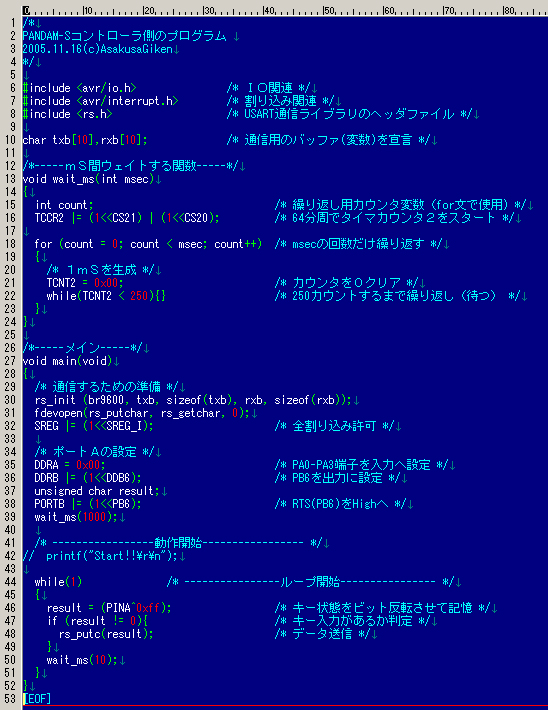
丂俿倃偐傜僨乕僞憲怣偲偄偭偰傕丄偁傜偐偠傔娭悢偑偱偒偰偄傞偺偱偦傟傪巊偆偩偗乮putc()娭悢偱侾暥帤憲怣乯偱偡丅巊偄曽偼儀僗僥僋偺僒儞僾儖僐乕僪傪傒傞偲傢偐傝傑偡丅
丂捠怣枅偵俴俤俢傪岝傜偣偨偐偭偨偺偱偡偑丄傗偭偰傒傞偲俼俿俽愗懼屻偺堦敪栚偺捠怣偑僐働傞傛偆偱丄傗偼傝俼俿俽偼忢偵俫倝倗倛偵偟偰傑偡乮峴俁俉乯丅
丂僜乕僗僐乕僪偼偙偪傜丂PANDAM_S_CON.c丂乮塃僋儕僢僋偱懳徾傪曐懚乯
丂偙傟偱僐儞僩儘乕儔懁偺姰惉偱偡丅
丂崱夞丄偁傑傝徻偟偔夝愢乮偲偔偵僴乕僪乯偟偰傑偣傫偑丄杮傗傜懠偺儁乕僕傗傜傪嶲徠偟偰偔偩偝偄丅
儘儃僢僩懁偺嶌惉
丂庴怣懁丄偮傑傝儘儃僢僩懁偱偡偑僐儗偼婎杮揑偵偼乽俙俿亅倂俙俴俲俤傪俹俠偐傜柍慄偱憖廲偡傞乿偱傗偭偨傕偺偲摨偠峫偊曽偱偡丅僄儗僉宯偼偦偪傜偺儁乕僕傪嶲徠婅偄傑偡丅
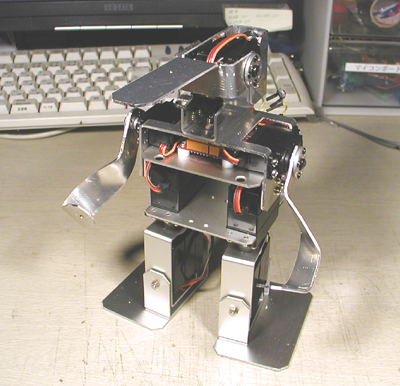
丂崱夞丄僼儗乕儉傕怴嶌偵偟傑偟偨丅偲傝偁偊偢嶌偭偨偺偼偙傫側姶偠丅俙俿亅倂俙俴俲俤俼偺忋偵俼俉侽傪庢傝晅偗偰丄偦偺忋偵抜乆偵僼儗乕儉傪廳偹偰僒乕儃俁偮捛壛偟偰傑偡乮寁俈屄乯丅
丂僒乕儃偼俹俼俽俁係侽侾亄愺憪僊尋惢儊僞儖儂乕儞傪巊偭偰傑偡丅偙偺儊僞儖僐乕儞偱偡偑丄嶌偭偨偲偨傫偵儊乕僇乕乮JR乯偐傜儘乕僴僀僩儊僞儖儂乕儞偑弌偰丄慡慠攧傟偰側偄偲偄偆傕偺丅僂僠偺偼儊乕僇乕偺傛傝僶僢僋儔僢僔儏偑柍偄傫偱偡偑偹偉丅
丂側傫偩偙偺庤偺傂偹傝偼丠丠丠乮俙俆侽俆俀偺侾丏俆倣倣岤傪儁儞僠偱嫮堷偵嬋偘偰傑偡丅旀傟偨丄乯
丂偲丄巚偭偨曽偑偄傞偲巚偄傑偡偑丄
丂傑偨傗偭偰偟傑偄傑偟偨丅

丂偙偺丄庤偺妏搙傪挷惍偡傞偺偵堦帪娫丏丏丏壗傪傗偭偰傞傫偩偐丏丏丏
丂婲偒忋偑傝側偳偺婡擻揑側峔憿偼傑偭偨偔峫偊傜傟偰偄側偄丄偐傢偄偝偩偗傪捛媮偟偨僼儗乕儉偱偡丅
丂偲傝偁偊偢丄僷儞僟儉亅俽偲柦柤丅
丂偙偺僷儞僟偺偸偄偖傞傒偼晛捠偺僒僀僘偲彫偝偄偺偲偁傝傑偡偑偙傟偼彫偝偄曽偱偡丅彫偝偄曽偱傕攚拞傪愗傟偽俙俿亅倂俙俴俲俤俼偵偐傇偣傜傟傑偡丅乮偟偐偟丄偙偺僷儞僟偼倀俥俷僉儍僢僠儍乕偵偼抲偄偰側偄傛偆偱偡丄偩偄傇慜偐傜丅儗儞僞儖儃僢僋僗偱傑傟偵攧傜傟偰偄傞丅乯
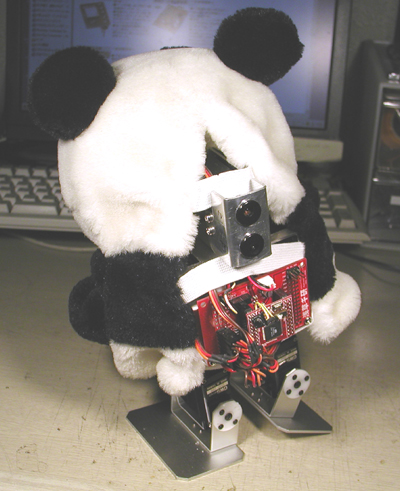
丂幚偼僨儌梡側偺偱奜晹揹尮巇條偵側偭偰傑偡(庱偵俙俠傾僟僾僞傪憓偡乯丅
丂攚拞偼懢偄僑儉傂傕偱偮側偄偱傑偡丅
丂偦傟偱偼僐儞僩儘乕儔偐傜偺僨乕僞傪庴怣偟偰儌僯僞偟偰傒傑偡丅僾儘僌儔儉偱偡偑丄乽俙俿亅倂俙俴俲俤傪俹俠偐傜柍慄偱憖廲偡傞乿
偱僥僗僩偟偨傕偺偲摨偠傕偺傪巊偄傑偟偨丅
丂憲庴怣偑屌掕側偺偱丄儘儃僢僩懁乮庴怣懁乯偺揹尮傪擖傟偨屻偵丄僐儞僩儘乕儔懁(憲怣懁乯偺揹尮傪擖傟傑偡丅惓忢偵捠怣偱偒傞忬懺偵側傟偽丄憲怣懁俴俤俢偑愒丄庴怣懁偑椢偵側傝傑偡丅弴斣傪媡偵偡傞偲庴怣懁偑椢偵側傝傑偣傫乮庴怣忬懺偵側傜側偄乯丅
丂忋偺僾儘僌儔儉傪儘儃僢僩懁偵擖傟偰丄僔儞僾儖僞乕儉偱寢壥傪昞帵偟偨偺偑壓偺傛偆偵側傝傑偡丅
丂
丂僆儗儞僕偺嵍塃僉乕傪摨帪偵墴偟偨偲偙傠偱偡丅侽倶侽係偲侽倶侽俉偺僉乕傪摨帪偵墴偟偨偺偱侽倶侽俠偑昞帵偝傟傑偟偨丅
丂偲偄偆偙偲偱屻偼庴怣偟偨僨乕僞傪摦偒偵妱傝摉偰偰偄偗偽傛偄偩偗偱偡丅
儌乕僔儑儞丄憖嶌寢壥
丂儅僀僐儞傪巊偭偰俼俠僒乕儃傪嬱摦偡傞偵偼婎杮揑偵僞僀儅偲妱傝崬傒傪巊偭偰丄俼俠僒乕儃偺怣崋慄偵摿掕偺僷儖僗怣崋傪壛偊傑偡丅偙偺偁偨傝偺僾儘僌儔儉偼杮偺曽偵徻偟偔彂偄偰偁傝傑偡丅
丂儌乕僔儑儞僨乕僞傪娭悢壔偟偰偍偒丄庴怣偟偨僨乕僞偵傛偭偰switch暥偱儌乕僔儑儞傪屇傃弌偣偽儘儃僢僩傪憖廲偡傞偙偲偑偱偒傑偡丅
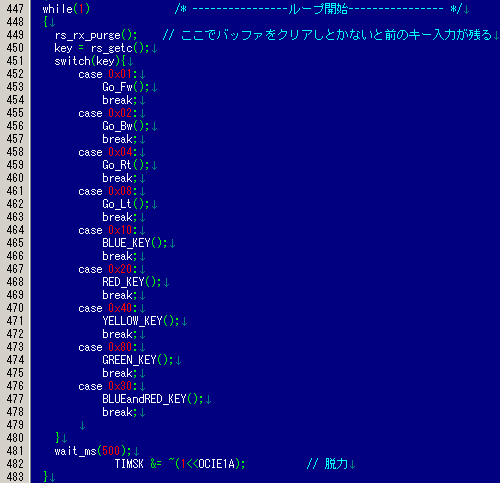
丂崱夞偺儘儃僢僩偼僨儌梡側偺偱丄奜晹揹尮偱摦偒偭傁側偟偵側傞偙偲偑憐掕偝傟傑偡丅俙俿亅倂俙俴俲俤俼偼彫偝偄偺偱丄懌晹偺僒乕儃傪扙椡偟偰傕搢傟傑偣傫丅傛偭偰丄摦嶌枅偵僒乕儃傪扙椡偝偣傞偙偲偵偟傑偟偨丅忋偺係俉俀峴偺傛偆偵丄妱傝崬傒傪晄嫋壜偵偡傟偽僒乕儃嬱摦梡偺妱傝崬傒儖乕僠儞偑屇傃弌偝傟側偄偺偱僷儖僗偑僼儔僢僩亖僒乕儃扙椡偲側傝傑偡乮僷儖僗僼儔僢僩偼僒乕儃偵傛偭偰偼扙椡偱側偄傕偺傕偁傝傑偡偺偱拲堄丅俽侽俁俿偼扙椡偟傑偡丅乯丅媡偵丄儌乕僔儑儞偵旘傫偩偲偒偵偙偺俿俬俵俽俲偺俷俠俬俤侾俙傪僙僢僩偡傟偽僷儖僗偑敪惗偟偰僒乕儃偑摦偐偣傞傛偆偵側傝傑偡丅
仸摿庩儗僕僗僞偺摿掕偺價僢僩傪侾偵偡傞偙偲傪乽僙僢僩乿丄侽傪乽僋儕傾乿偲昞尰偟傑偡丅俙俿俵俤俴乮ATmega32偺儊乕僇乕乯偱偼丅
丂儘儃僢僩偵傛傝丄儌乕僔儑儞僨乕僞偺悢抣偼堘偆偲巚偄傑偡偺偱丄慡僾儘僌儔儉傪徯夘偟偰傕偁傑傝堄枴偑柍偄偲巚傢傟傑偡偑丄擮偺偨傔丄慡僾儘僌儔儉偼偙偪傜偵側傝傑偡丅
丂PANDAM_S_ROBO.c丂(塃僋儕僢僋偱懳徾傪曐懚乯
丂偄傠偄傠側僾儘僌儔儉傪愗傝揬傝偟偰偮偔偭偨偺偱丄堦晹晄梫側曄悢側偳傕偁傝傑偡偺偱拲堄偟偰壓偝偄丅
丂偲偄偆偙偲偱丄塮憸傪傾僢僾偟偰偍偒傑偡丅壓偺幨恀傪僋儕僢僋偡傞偲尒傟傑偡丅
丂帺暘偱尵偆偺傕僫僯偱偡偑丄偐側傝偐傢偄偄偱偡丅
丂 AVI僼傽僀儖5.8MB AVI僼傽僀儖5.8MB
丂偪側傒偵丄偙偺僷儞僟儉偼弶戙僷儞僟儉偲岎戙偱丄廐梩尨偺僣僋儌儘儃僢僩墹崙偝傫偱媞婑偣僷儞僟偲偟偰摥偄偰傑偡丅偍棫偪婑傝偺嵺偼惀旕丄憖嶌偟偰傒偰偔偩偝偄丅
俀侽侽俆擭侾侾寧侾俉擔
丂仸偙偺儁乕僕偱徯夘偡傞撪梕偼偁偔傑偱傕堦椺偱偡丅屄暿偺嶌惉偺偛憡択偛幙栤偼偍摎偊偱偒偐偹傑偡偺偱傛傠偟偔偍婅偄偄偨偟傑偡丅偙偺儁乕僕偲摨偠撪梕偵偮偄偰偺偛幙栤偵偮偄偰偼儘儃僢僩宖帵斅偵偰偍婅偄偄偨偟傑偡丅
|
| 丂 |
|